 26. listopadu 2016
26. listopadu 2016


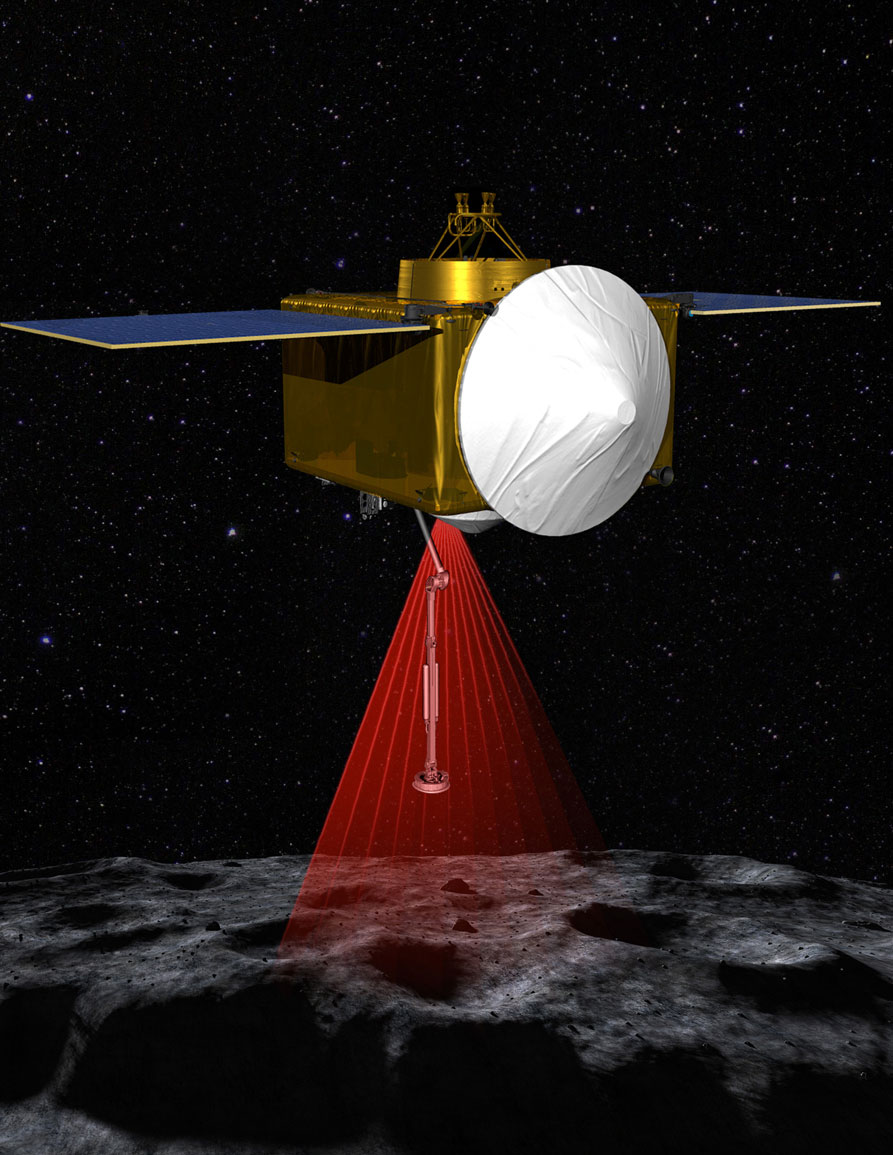
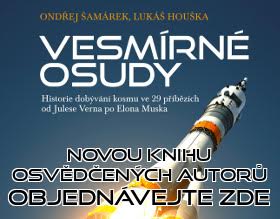
Hlavním (a mediálně i vědecký nejatraktivnějším) cílem americké sondy OSIRIS-REx je odebrat vzorky hornin z povrchu asteroidu Bennu a dopravit je za Zemi pro podrobnou analýzu. Ke splnění tohoto cíle jsou potřeba dva hlavní systémy – mechanismus pro odběr a manipulaci s možná až dvěma kilogramy vzorků z povrchu asteroidu a návratové pouzdro, které tyto vzorky bezpečně dopraví na Zemi. V našem nepravidelném seriálu jsme se již seznámili s konstrukcí sondy i jejími vědeckými přístroji. Dnes se podíváme na zoubek právě systému TAGSAM (Touch-And-Go-Sample Acquisition Mechanism), který se stará o odběr vzorků a manipulaci s nimi. V příštím díle se zaměříme na návratové pouzdro.
Samotný systém TAGSAM se skládá z oddělitelné odběrné hlavy a pohyblivého ramene. Do kontaktu s povrchem asteroidu přijde pouze odběrová hlava, která zde uvolní stlačený dusík. Ten se postará o zvíření regolitu, který bude následně zachycen odběrovým zařízením v odběrné hlavě. Sonda bude moci vykonat až tři pokusy o odběr vzorků.
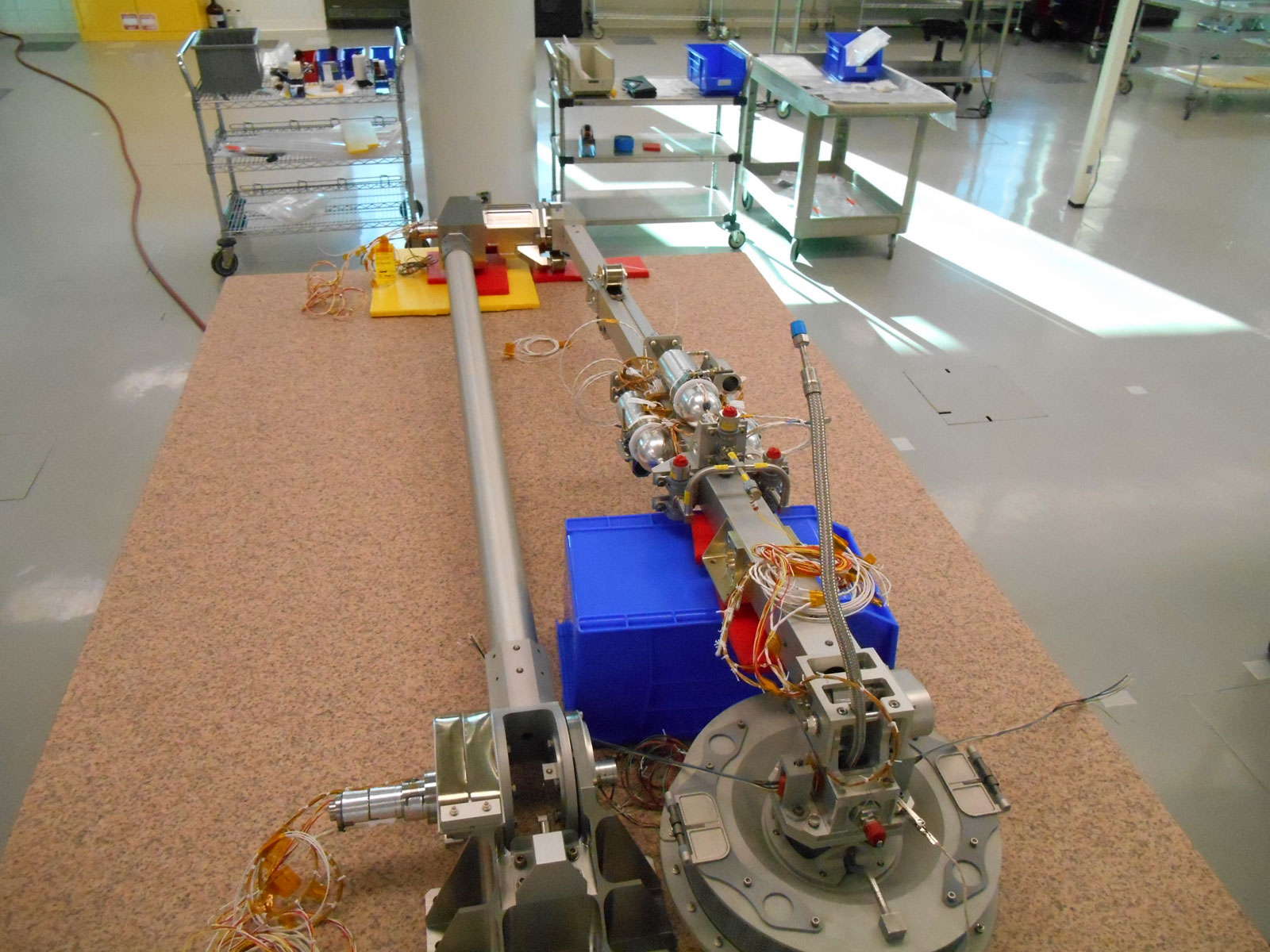
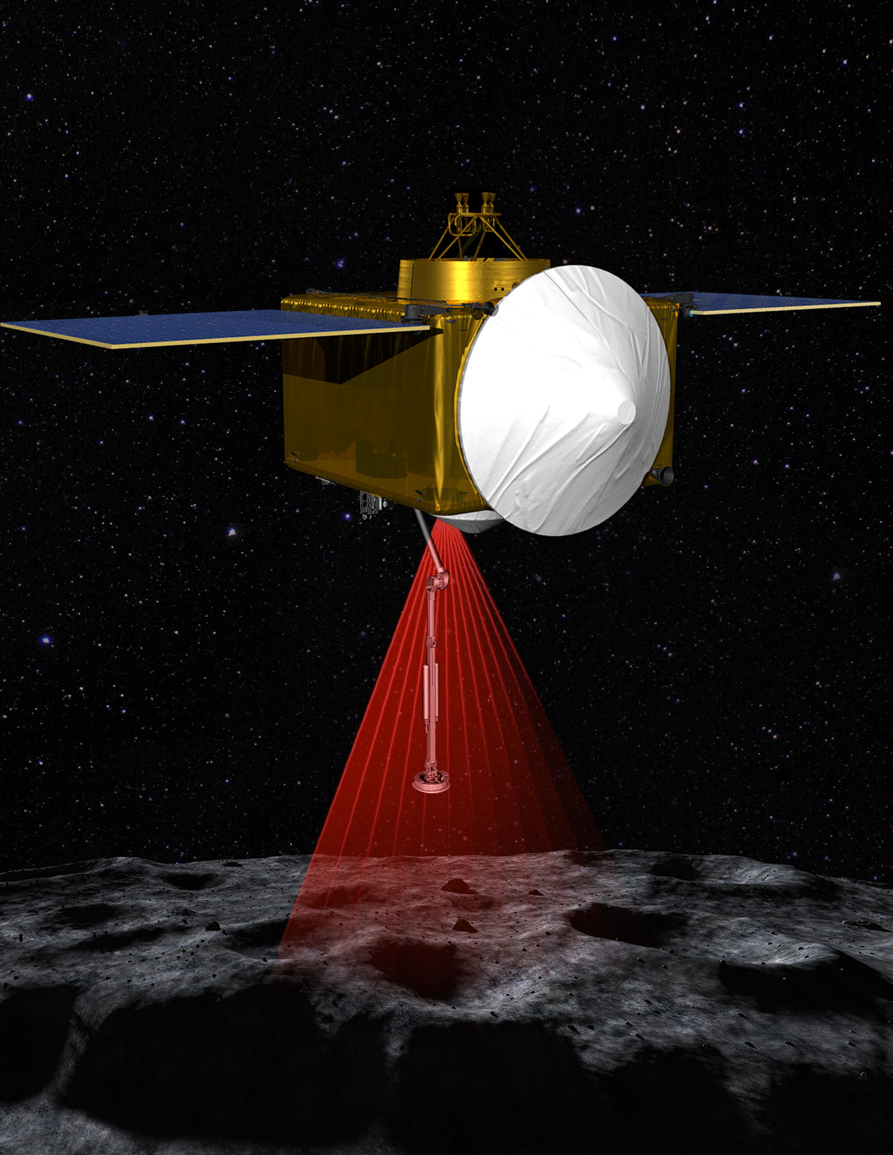
Systém TAGSAM ještě před připojením k sondě OSIRIS-REx
Zdroj: http://spaceflight101.com/
TAGSAM je umístěný na spodní straně sondy a před odběrem se pohyblivé rameno napřímí, sonda opustí oběžnou dráhu a rychlostí 0,1 m/s se vydá k povrchu. Ke kontaktu dojde v bezpečné odběrné oblasti, která bude široká 25 metrů. Kontaktem s povrchem se stlačí pružiny a aktivuje se proud uvolněného dusíku. Tím dojde prakticky ke „ztekutění“ regolitu – jemný prach a drobná zrnka se v proudu plynu začnou vířit a odběrová hlava zachytí malá zrnka, zatímco jemný prach ulpí na kontaktních polštářcích.
Samotný kontakt bude trvat pouze pět sekund, pak se sonda začne od povrchu vzdalovat a kamera SamCam pořídí několik fotek vzorků v odběrné hlavě. Jakmile bude potvrzeno, že se v mechanismu nachází dostatečné množství materiálu, robotické rameno uloží odběrnou hlavu do návratového pouzdra, které se následně uzavře a připraví se na cestu k Zemi.
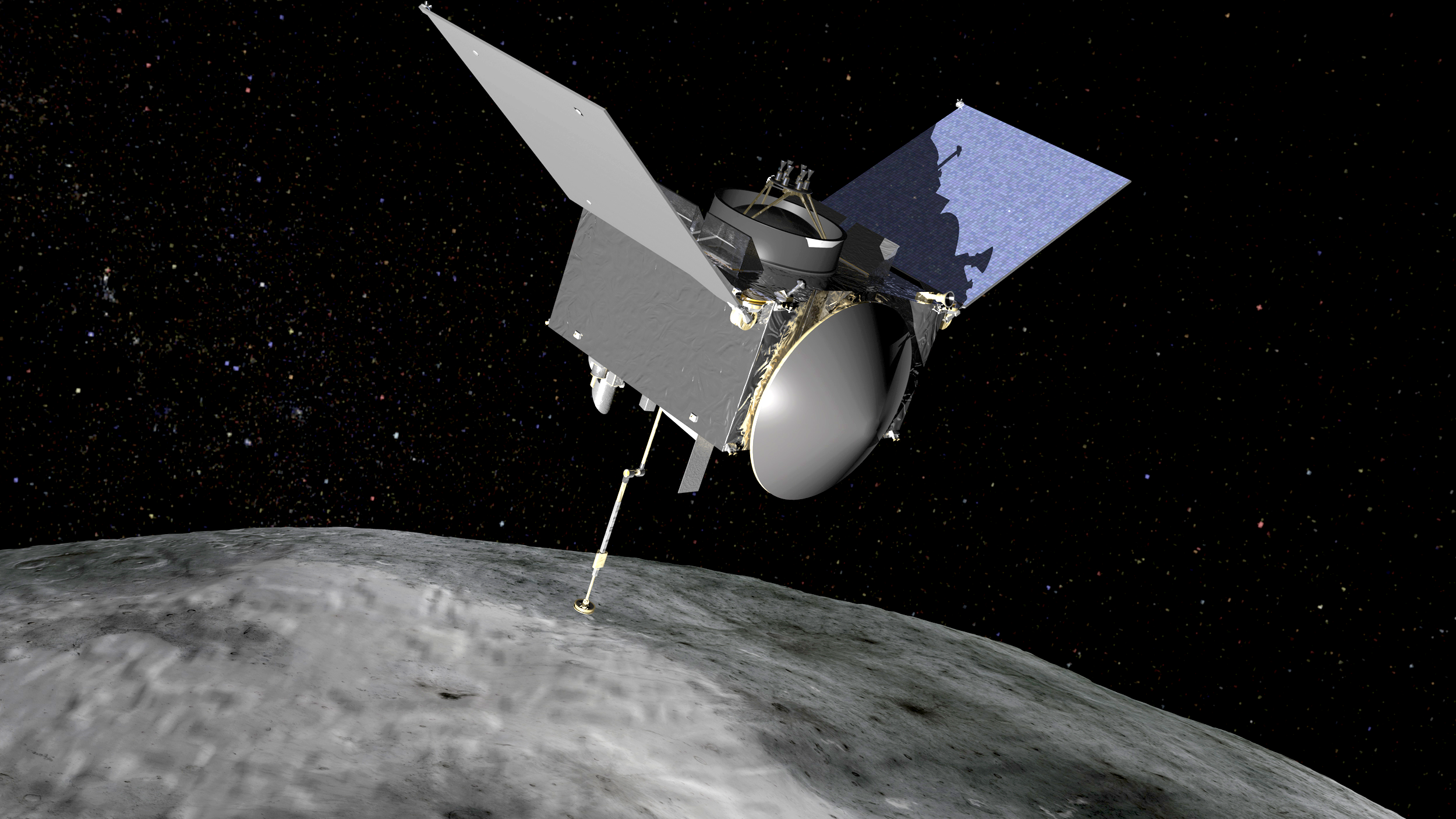
Samotná robotická paže má celkovou délku 2 metry a najdeme v ní redundantní elektromechanické pohyblivé prvky, které fungují jako rameno, loket a zápěstí. Tyto klouby umožní buďto v plně nataženém stavu umístit odběrnou hlavu dva metry od těla sondy, ale stejně tak s jejich pomocí bude možné hlavu přiblížit ke kameře pro pořízení detailních fotek a následně hlavu uložit do návratového pouzdra.
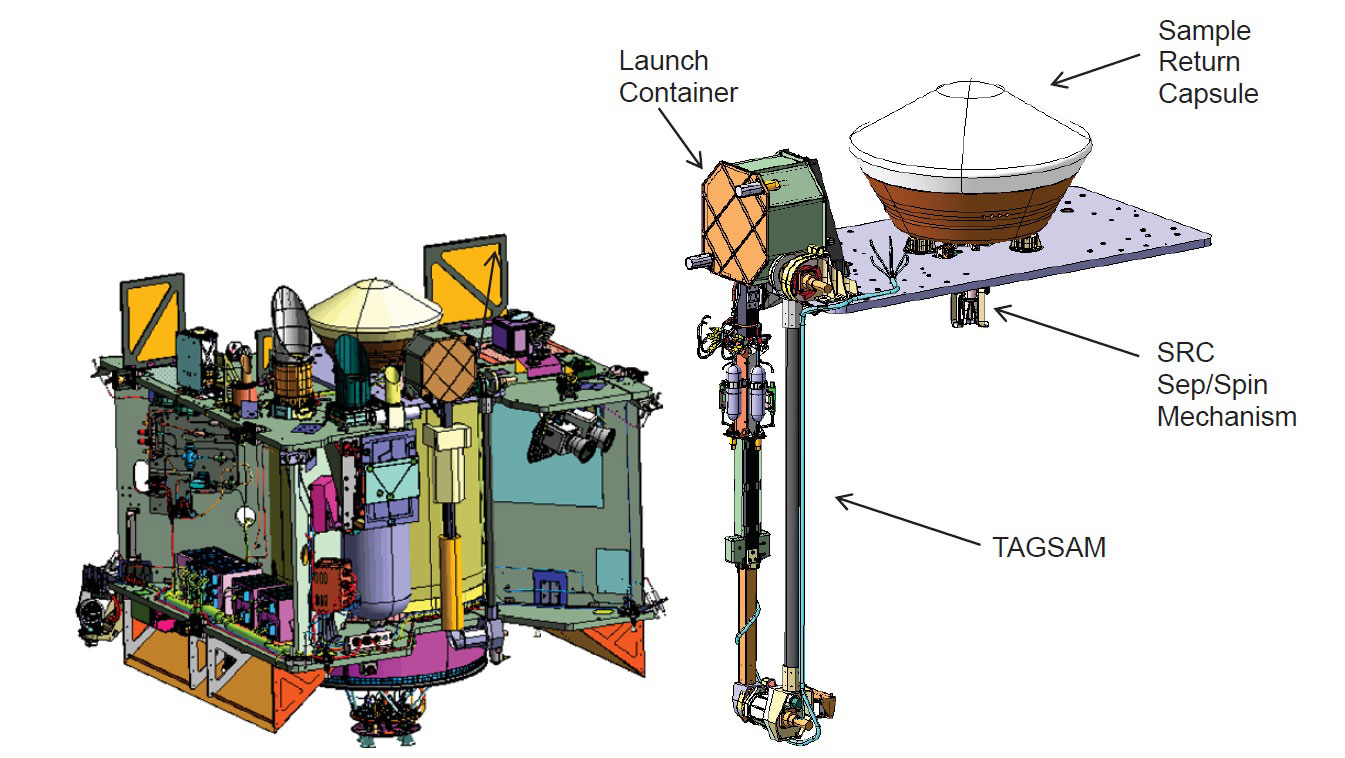
Vizualizace systému TAGSAM. Launch container je zařízení,které drží hlavu na místě při startu.
Zdroj: http://spaceflight101.com/
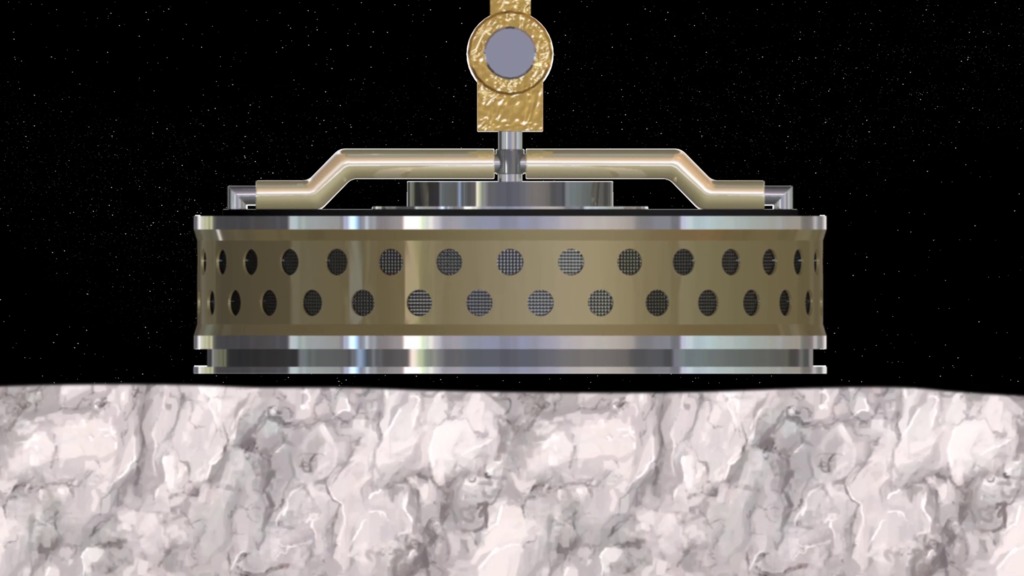
Odběrná hlava je nízké válcovité těleso, které bylo při startu drženo na místě speciálním mechanismem. Spodní část robotického ramene obsahuje nádrže s dusíkem, pružiny pohlcující energii z nárazu a v „zápěstí“ se na „předloktí“ připojuje samotná odběrová hlava. Ta je v kloubu připojena volně a umožňuje náklon až 15° ve všech směrech, aby základna hlavy mohla dosáhnout ideálního kontaktu s povrchem. Pokud bude sklon větší než 15°, znamená to, že odběrná oblast není rovná a k odběru nedojde.
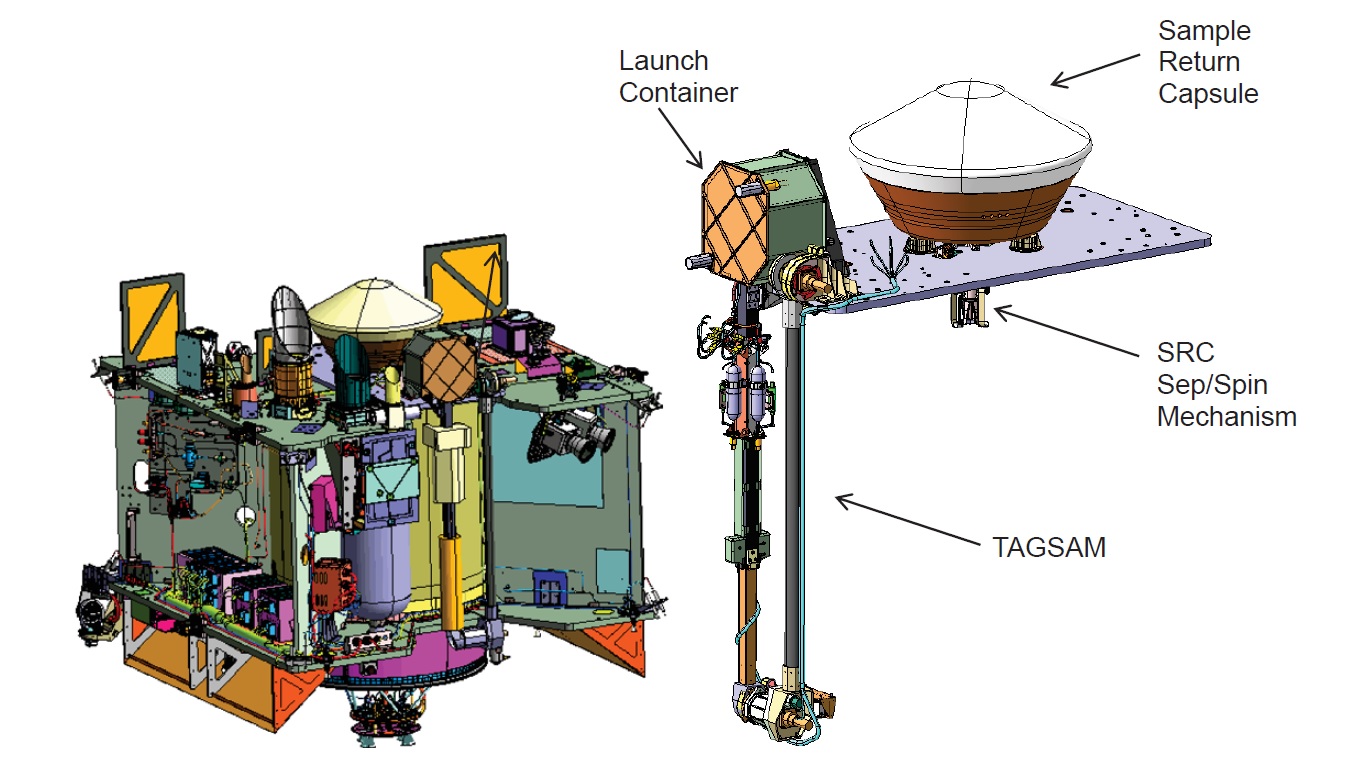
Proud stlačeného dusíku bude mířit do oblasti vnějšího průměru odběrové hlavy a odtud poteče směrem do středu. Při této cestě bude proud dusíku z povrchu strhávat částice regolitu až o velikosti 2 cm. Proudící dusík otevře klapky z mylaru a odnese vzorky až k sítu, které umožní plynu uniknout, ale zadrží všechny částice kromě těch nejjemnějších. Jakmile proud ustane, mylarové klapky se automaticky uzavřou a materiál tak bude uzavřen. Kontaktní polštářky pokrývají plochu 26 čtverečních centimetrů a jejich úkolem je zachytit jemné částice do průměru 1 milimetru.

Princip fungování odběrné hlavy.
Zdroj: http://spaceflight101.com/
Překlad: Autor
Odběrná hlava je schopná pojmout 150 – 2000 gramů materiálu, přičemž kontakt s povrchem bude detekován kombinací dat z inerciální měřící jednotky, která zaznamená zpomalení a dat z mikrospínačů v odběrné hlavě, což zahájí výše popsanou pětisekundovou sekvenci. O odlet od povrchu se postarají pružiny – ve fázi sestupu se nebudou používat hydrazinové trysky kvůli riziku kontaminace odběrné oblasti zbytky hydrazinových zplodin.

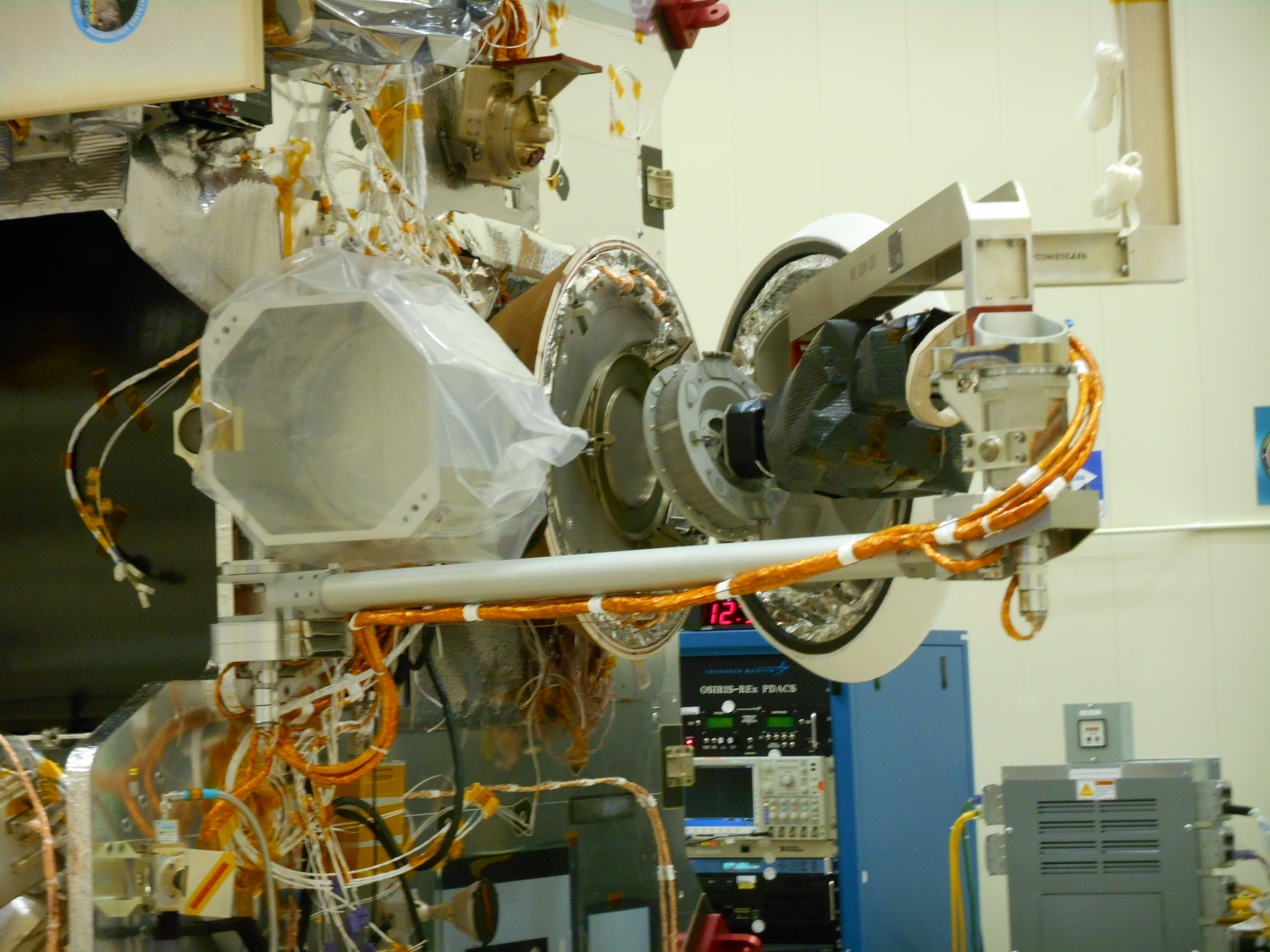
Zkouška systému TAGSAM
Zdroj: http://spaceflight101.com/
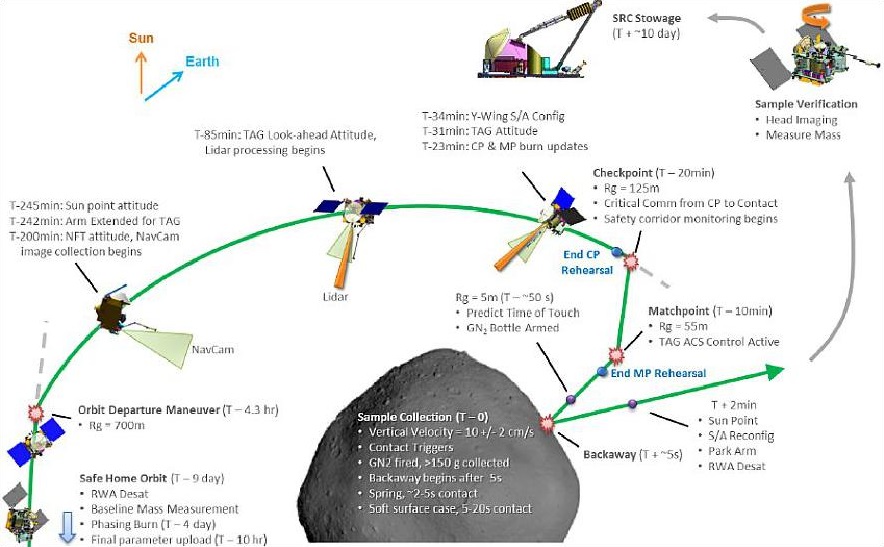
Po vybrání nejvhodnější přistávací oblasti z hlediska zvážení bezpečnosti a vědecké atraktivity na základě dálkového průzkumu zahájí OSIRIS-REx finální přípravu na odběr vzorků. Tato finální příprava začne celých devět dní před kontaktem s povrchem. Devět dní před kontaktem sonda desaturuje své gyroskopy, což znamená, že na svých čtyřech setrvačnících uvolní přebytečnou energii snížením rychlosti jejich rotace. Vzniklý tah budou korigovat malé trysky na těle sondy.
Tyto zážehy korekčních trysek drobně změní oběžnou dráhu kolem asteroidu a specialisté na navigaci budou potřebovat až pět dní na to, aby určili její přesné parametry, což je klíčové pro naprogramování všech manévrů, které souvisí s odběrem. Dalším krokem bude manévr zvaný Baseline Mass Measurement, při kterém se sonda roztočí ve dvou polohách robotické paže. Cílem je vypočítání momentu setrvačnosti celého tělesa. Podobný manévr přijde i po odběru a poskytne údaje o hmotnosti odebraného vzorku s přesností na pár desítek gramů.
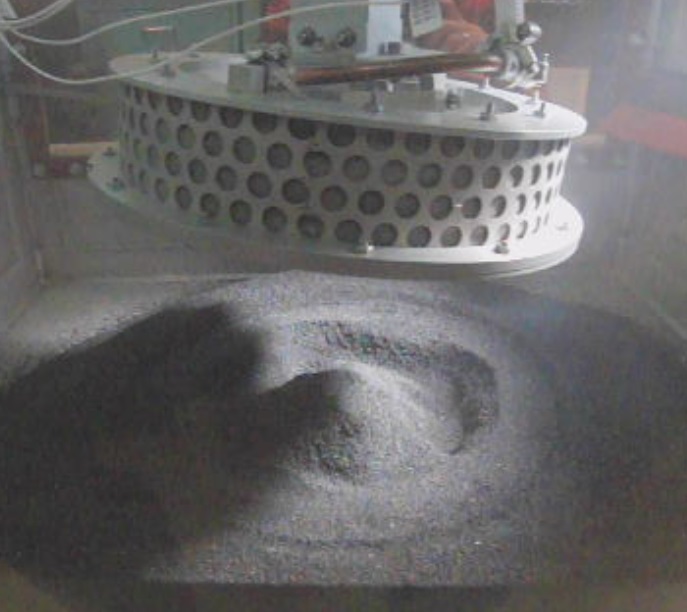
Test zařízení TAGSAM ve stavu mikrogravitace
Zdroj: http://spaceflight101.com/
Mezi dny T-4 a T-1 použije sonda své nízkotahové trysky pro vykonání fázovacích manévrů, které budou měnit rychlost sondy o méně než 1 mm/s. Specialisté budou dráhu drobně ladit, aby sonda po opuštění oběžné dráhy přesně mířila do vybrané lokality. Odeslání pokynu pro odběr přijde 10 hodin před kontaktem a bude obsahovat všechny instrukce potřebné pro tento manévr. Údaje přitom budou založeny na nejčerstvějších měřeních parametrů oběžné dráhy.
Manévr pro opuštění oběžné dráhy přijde 4 hodiny a 20 minut před kontaktem – sonda se bude v té době nacházet na oběžné dráze ve výšce asi 125 metrů nad povrchem. V čase 4 hodiny a 5 minut do kontaktu se sonda obrátí zpět do původní orientace, kdy zamíří solárními panely ke Slunci – přitom se zároveň na Zemi odešlou potřebná data, na která už budou netrpělivě čekat inženýři zapojení do této mise.
Sonda se ale bude stále chystat na odběr. Čtyři hodiny a dvě minuty před kontaktem sonda natáhne svou robotickou paži až do chvíle, kdy senzory potenciometrů potvrdí plné natažení. Tři hodiny a dvacet minut před kontaktem se sonda obrátí do orientace vhodné pro snímání kamerou NavCam, což je jedna z kamer, která je součástí zařízení TAGSAM. Snímky z této kamery budou zachycovat přibližování k odběrné oblasti, pomohou rekonstruovat průběh celého manévru a pomohou i optické navigaci s pomocí algoritmu Natural Feature Tracking. Tento systém se použije jako záloha v případě selhání primárního lidaru.
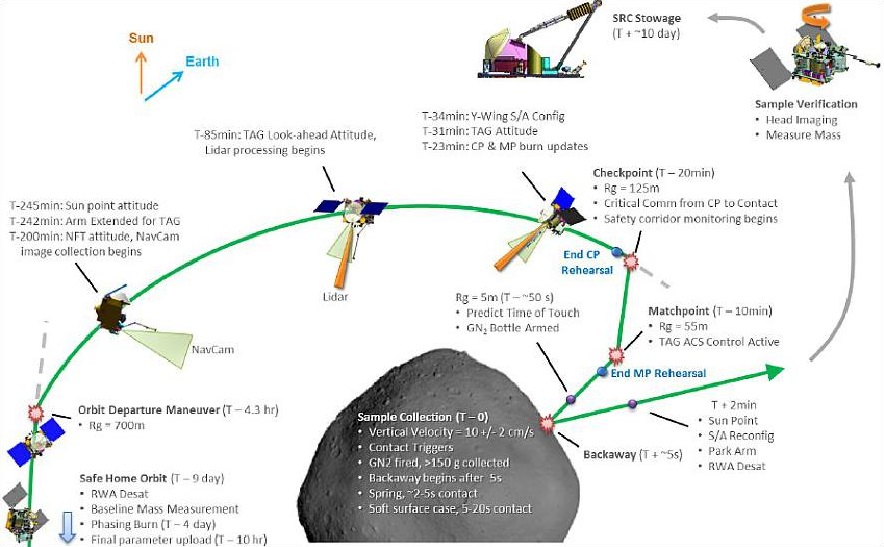
Schéma sestupu – vyšší rozlišení infografiky není bohužel k dispozici
Zdroj: http://spaceflight101.com/
Právě lidar začne svou práci 85 minut před kontaktem. Odrazy laserových paprsků od povrchu poskytnou velmi přesná data o vzdálenosti sondy od asteroidu. V čase 34 minut před kontaktem se solární panely sklopí do konfigurace, kdy sonda připomíná písmeno Y. Důvod je prostý – jde o snahu eliminovat riziko kontaminace panelů zvířeným prachem. Finální konfigurace pro odběr vzorků včetně polohy ramene sonda dosáhne 31 minut před kontaktem a senzory stále budou sbírat data pro korekční manévry, které budou provedeny 23 minut před kontaktem v takzvaném checkpointu.
Jako checkpoint se označuje místo vzdálené 125 metrů od odběrného místa a sonda tu s pomocí svých ultrajemných trysek provede korekci své dráhy. Z pasivní průletové se změní na dráhu pronásledovací. Po dokončení „checkpoint zážehu“ se sonda přepne na kritickou komunikaci a zahájí bezpečnostní mapování koridoru, měření vzdálenosti a rychlosti přibližování. Sonda se s pomocí těchto údajů bude snažit, aby zůstala v plánovaném přímém koridoru.

Další vizualizace dráhy sestupu
Zdroj: http://spaceflight101.com/
Pokud by nějaký parametr ukázal, že se sonda odchyluje z bezpečného kurzu, řídící jednotka okamžitě sestup ukončí, zažehne své motory a změna rychlosti o 0,7 m/s pošle sondu mimo povrch, kde OSIRIS-REx počká na pokyny ze Země. Před samotným odběrem sonda provede dva nácviky, přičemž každý z nich bude trvat zhruba 3 týdny. První z nich bude obnášet manévry do checkpointu a druhý do pozice po matchpointu, čímž budou dokončeny všechny zkoušky nutné pro odběr vzorků aniž by došlo k samotnému kontaktu.
Snímání lidarem měří výšku nad terénem
Zdroj: http://spaceflight101.com/
Matchpoint označuje místo, kterého sonda dosáhne deset minut před kontaktem a které je 55 metrů od odběrné oblasti. Tady dojde k závěrečnému drobnému zážehu, který sníží rychlost na 10 cm/s s odchylkou +/- 2 cm/s. Jakmile lidar zaznamená vzdálenost od povrchu pět metrů, bude do kontaktu zbývat asi 50 sekund. V tu chvíli se sonda přepne na speciální režim – deaktivuje své trysky a naopak aktivuje nízkotahový kontrolní systém pomocí gyroskopů (Low-Torque Reaction Wheel Control). V té chvíli dojde k aktivaci spínače vlastního odběrného zařízení a aktivuje se roznětka pyrotechnicky ovládaného ventil na nádobě se stlačeným dusíkem. Řídící počítač začne odpočítávat čas do plánovaného kontaktu.
Pokud ke kontaktu nedojde předtím, než časovač doběhne, zahájí sonda tzv. abort manévr. Jak již je uvedeno výše – indikátory, které oznámí kontakt, je zpomalení sondy zaznamenané pomocí Inertial Measurement Unit a také stlačením mikrospínačů v systému TAGSAM. K aktivaci pyroventilů přitom stačí pozitivní pokyn od kteréhokoliv z těchto systémů.

Vizualizace kontaktu
Zdroj: http://spaceflight101.com/
Jakmile se odběrná hlava dotkne povrchu, pružiny v systému TAGSAM se stlačí a tím pohltí pohybovou energii. Když výše popsané systémy zaznamenají kontakt, začne běžet pětisekundová sekvence do opouštěcího manévru. V krajním případě, kdy by byl v kontaktní oblasti tvrdý povrch, který by stlačil pružiny na maximum a došlo k odrazu, by kontakt odběrné hlavy trval jen dvě sekundy. Pokud bude povrch naopak velmi měkký, se může kontakt protáhnout až na 20 sekund.
Při samotném odběru budou aktivní senzory snímající polohu sondy vůči povrchu. Sonda bude mít vypnuté korekční trysky do chvíle, kdy doběhne odpočet, nebo do momentu, kdy se sonda vůči povrchu nakloní o více než 45°. V tu chvíli dojde k okamžité aktivaci opouštěcího manévru. Při odletu se opět aktivují korekční trysky a svými zážehy stabilizují sondu ve všech osách a eliminují tak všechny odchylky, které způsobil kontakt s povrchem. Následovat bude zážeh, který změní rychlost sondy o 70 cm/s, což zajistí opuštění nízkých oblastí kolem povrchu. Dvě minuty po kontaktu se sonda otočí do běžné orientace se solárními panely namířenými ke Slunci. Robotická paže bude zaparkována ve stabilní poloze, kdyby řídící systém vyhodnotil, že gyroskopy, na které se sonda v minulých minutách spoléhala, potřebují desaturovat.
Detail odběrné hlavy TAGSAM
Zdroj: http://spaceflight101.com/
Samotný sestup musí probíhat přesně podle plánu a je zde jen malý prostor pro odchylky. Sonda musí sestoupit do oblasti o průměru 25 metrů s rychlostí odchylkou 2 cm/s, aby se eliminovalo riziko překlopení. Po ukončení kontaktu vstoupí sonda do stejně důležité fáze, která ověří, zda bylo odebráno dostatečné množství materiálu. Několik dní po odměru dojde k rotačním měřením hmoty sondy. Systém samozřejmě započítá i palivo, které bylo spotřebováno od minulého vážení popsaného výše. Simulace naznačují, že tento proces by měl být schopen určit hmotnost odebraného vzorku s přesností lepší než 50 gramů.
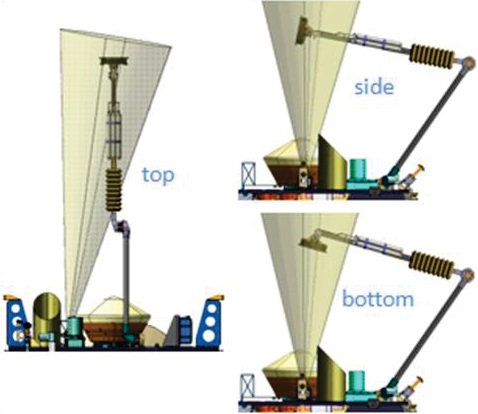
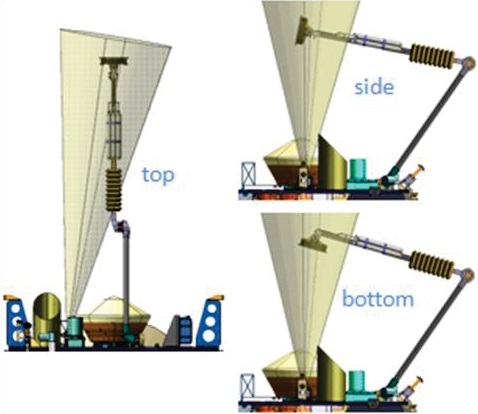
Snímkovací sekvence kamery SamCam
Zdroj: http://spaceflight101.com/
Kamera SamCam pořídí snímky odběrné hlavy ze tří různých úhlů pohledu. První pohled bude mířit dolů na horní část hlavy. Následovat bude boční snímek a vše bude zakončeno fotkou spodní části hlavy. Tyto snímky poskytnou vizuální potvrzením, že byl materiál odebrán a zároveň ověří, že povrch hlavy je čistý a nejsou na něm žádné překážky, které by mohly zkomplikovat její ukládání do návratového pouzdra. Pokud bude na snímcích objevena překážka, přistoupí se k blíže neupřesněným procedurám, které se úspěšně testovaly v pozemských podmínkách.
K samotnému odběru vzorků by mělo dojít v červnu roku 2020, přičemž plán počítá s osmiměsíční rezervou. Sonda OSIRIS-REx opustí asteroid Bennu v březnu 2021, což poskytuje dostatek času pro kontrolu celého systému TAGSAM případné opakování celého procesu. Celkem má sonda k dispozici až tři pokusy, pokud by se cokoliv pokazilo.

Ukládání odběrné hlavy do návratového pouzdra – všimněte si tří zámků
Zdroj: http://spaceflight101.com/
Týmy kolem sondy OSIRIS-REx budou množství odebraných vzorků konzultovat s odborníky z centrály NASA, aby bylo jisté, že jsou s množstvím spokojené všechny zainteresované strany. Pro oddělení odběrné hlavy se nejprve musí otevřít návratové pouzdro Sample Return Capsule. Robotická paže opatrně dopraví hlavu s vzorky na místo, kde dojde k jejímu kontaktu se třemi zajišťovacími mechanickými zámky. Správné uložení hlavy potvrdí jednak mikrospínače, ale i snímky z kamery StowCam, která nafotí uloženou hlavu ještě předtím, než dojde k jejímu oddělení od robotické paže. Tím bude ukončena práce systému TAGSAM – o zbytek mise se už postará sama sonda OSIRIS-REx a pozemní navigátoři, kteří navedou návratové pouzdro vstříc Zemi. Ale o návratovém pouzdru si řekneme více v příštím díle našeho seriálu.
Zdroje informací:
http://spaceflight101.com/
Zdroje obrázků:
http://spaceflight101.com/…/103/2016/08/OSIRIS-REx-Spacecraft-at-Bennu.png
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/dscn0251.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-11.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-34.jpg
http://spaceflight101.com/…/sites/103/2016/08/15-osiris-rex-sample-return-arm-test-167.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-31.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osiris-31.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-32.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osiris-rex-scan.jpg
http://spaceflight101.com/…/uploads/sites/103/2016/08/tagsam-at-bennu.png
http://spaceflight101.com/…/sites/103/2016/08/tagsam3D_youtube_hq00027_print.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-35.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/dscn2458.jpg





 Rubrika
Rubrika  Štítky:
Štítky: 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ryugu má navíc průmět 1km oproti 0,4 km amerického cíle. Jsou tam rozdíly v přitažlivosti a tudíž i ve schopnosti zadržení částic po impaktech. Menší těleso by mělo mít slabší vrstvu regolitu v hrubším provedení.
Gravitační pole tak malých těles je téměř zanedbatelné.
Díky za ďalšiu porciu hodnotných informacií, Dugi. Je super že mám možnosť sa o týchto poznatkoch dozvedieť.
Inak, je to fascinujúce ako je to vymyslené…
Má to jen jednu chybu. Odebírat se bude regolit. Což nemusí nutně být původní součást asteroidu, ale zcela určitě bude obsahovat vysoké procento materiálu z těles dopadlých na asteroid. Japonci jdou dále, chtějí nabrat materiál po explozi projektilu, tedy z vrstev pod regolitem, nekontaminovaných implozemi cizích těles. Pro upřesnění, vzorky regolitu asteroidu již Japonci na Zemi dopravili v misi Hayabusa 1.
Mal by som otázku – ako je riešené odfiltrovanie splodín explózie od pôvodného materiálu?
Přímo na povrchu Ryugu k žádné explozi nedojde. Sonda vypustí zařízení s impactorem, to klesne níže nad povrch planetky, tam dojde k explozi nálože HMX a k odpálení měděného impactoru rychlostí asi 2 km/s k povrchu, kde vytvoří kráter.
Spíš by to chtělo navrtat, ale víme, jak dopadl Philae. Ostatně je z toho vidět, že mise ARM, pokud se uskuteční, nebude až tak nezajímavá, jak si mnozí myslí.
Úžasné, fascinující a unikátní zařízení. Díky za jeho podrobný popis a už teď se těším na celou operaci u Bennu 🙂
Není mi jasné jak bude eliminována rotace asteroidu. Při operaci trvající hodiny bude místo pod sondou neustále ubíhat.
Pokud by sonda nenašla regolit, tj. prašnou vrstvu, tak přiveze jen mikročástice na “ polštářcích“.
Nejsem si jist, jak silné má asteroid gravitační pole, zda je možné kolem něj obíhat, ale jsem si jistý, že je možné jeho rotaci zmapovat natolik, že přistání s přesností na 25 m je reálné. Sojuzy taky letí mnohem rychleji než se točí Země a nakonec se přibližně trefí.
Věřím, že se odběr podaří. Času na výběr vhodného místa bude dost, srovnat vzájemnou rychlost sondy a malého tělesa by neměl být problém (vyzkoušela si to Hayabusa i Rosetta) a máme tři pokusy. Navíc sonda disponuje dvěma motory s velmi nízkým tahem, které by s ní měly jemně manipulovat právě během těch několika vteřin, během kterých musí zůstat zásobník v kontaktu s povrchem.