 26. dubna 2016
26. dubna 2016


S vývojem technik pro práci v otevřeném prostoru se ukázala být raketová křesla alespoň dočasně nadbytečná. Americký pilotovaný program si vystačil s manipulátorem RMS, známým jako „Kanadská ruka“. Do přípravku na jeho pracovním konci byla připevněna speciální plošinka, kam astronaut zaklesnul nohy a manipulátorem se nechal dovézt na požadované místo. Sověti používali staniční manipulátory Strela, jež připomínaly přerostlé rybářské pruty. Strely bylo možné přemisťovat po povrchu Miru a s jejich pomocí se mohli kosmonauti přemístit na jinak obtížně přístupná místa. Tam, kde se nedostal RMS nebo Strela, zbývala stará dobrá lopotivá cesta za pomoci úchytů a madel. Občas bylo nutné uchýlit se k nekonvenčním praktikám, jako v případě Sojuzu TM-9, k jehož uvolněné termální látkové obšívce se kosmonauti během výstupu z modulu Kvant 2 dostali za použití teleskopického žebříku. Celkově však raketová křesla nijak zvlášť nikomu nechyběla. Nicméně během prací na programu americké stanice Freedom se situace začala měnit. Některým nedávala spát myšlenka na možnost selhání bezpečnostních lanek, kterými se astronauti měli během výstupů poutat k povrchu stanice. Na rozdíl od raketoplánu stanice nedisponovala možností rychlého manévrování a nebylo proto možné pro nešťastníka dolétnout. Bylo třeba najít nějaké řešení, a tím řešením se ukázalo být – miniaturní raketové křeslo!
ISS: SAFER a USK
Jedním z těch, které myšlenka na astronauta ztraceného ve vesmíru pronásledovala, byl i Joe Kerwin. Bývalý astronaut, člen posádky Skylab SL-2, která stanici zmrzačené při startu pomohla vstát z mrtvých, opustil agenturu NASA v roce 1987. Jeho dalším působištěm se stala firma Lockheed, kde působil jako manažer Projektu systémů pro výstupy do volného prostoru (Extravehicular Systems Project) v rámci zamýšlené stanice Freedom.
Spolu s kolegy Paulem Cottinghamem a Tedem Christianem začal na konci osmdesátých let pomalu načrtávat první koncepci zařízení, jež je používáno dodnes. Základní idea představovala autonomní jednotku v podobě malého batohu, jenž by zajistil v případě nouze návrat astronauta ke stanici. Mělo se jednat čistě o prostředek použitelný v případě nouze, nic podobně těžkého, složitého ani verzatilního jako křeslo MMU nebylo v plánu.
Ve spolupráci s divizí automatizace a robotiky, sídlící v Johnson Space Center, se Kerwinovi a jeho týmu podařilo vyvinout zařízení, jež dostalo název SAFER. Název odráží až fanatickou posedlost NASA a aerokosmického průmyslu akronymy se specifickým významem. SAFER je zkratkou pro „Simplified Aid For EVA Rescue (Zjednodušená pomůcka pro záchranu během EVA)“, současně slůvko „safer“ znamená „bezpečnější“.
Přestože byl SAFER přijímán jako velmi slibný systém, neobešel se bez trochy konkurence. Mise STS-49 v květnu 1992 ukázala, že špatné nápady mají velmi tuhý kořínek. V letovém plánu totiž byly zahrnuty také testy několika prototypů zařízení pro záchranu posádky během EVA z budoucí stanice. Zkoušeno bylo lano s háky, jež měl astronaut v nouzi hodit směrem ke stanici, aby se tam zachytilo a tím zastavilo jeho driftování; teleskopická tyč se záchytným mechanismem na konci; tzv. „bi-stem pole“, tedy rozkládací tyč ze dvou tenkých ocelových pruhů; nafukovací tyč se záchytným mechanismem a jako poslední koncept měla být vyzkoušena… pistole HHMU!
Je až neuvěřitelné, jak tvrdošíjně trvali konstruktéři na tomto zařízení a znovu a znovu se snažili dokázat, že pistole je optimálním prostředkem pro přesun ve volném prostoru. A znovu a znovu se astronauti vraceli na Zem s tím, že pistole je velmi nešikovným prostředkem s omezenými možnostmi a je téměř nemožné provádět s ní precizní manévry a přesuny. Stejně dopadla i evaluace v rámci letu STS-49. Abychom byli spravedliví – velké nedostatky vykázalo všech pět zkoušených konceptů. Jedním z hlavních požadavků astronautů na perspektivní záchranné zařízení při EVA byla schopnost zastavit rotaci astronauta a stabilizovat jeho polohu v prostoru.
Tato možnost byla do SAFERu zakomponována a na konci léta 1994 byl první letový exemplář připraven k prvním testům na orbitu. Jednalo se o vývojový kus, který měl pouze ověřit funkčnost koncepce a v detailech se lišil od pozdějších sériových jednotek. Vyzkoušet SAFER ve volném letu měli během mise STS-64 astronauti Mark Lee a Carl Meade. Když se pak 16. září oba muži vydali z přechodové komory orbiteru Discovery do vakua kosmického prostoru, čekal na ně neobvyklý zážitek – první volný let bez jisticího lana skoro přesně dekádu po posledním použití křesla MMU v rámci mise STS-51-A.

Mark Lee během testů SAFERu
Zdroj: spaceflight.nasa.gov (kredit: NASA)
Jako první si let se SAFERem vyzkoušel Mark Lee. Velitel Dick Richards a pilot Blaine Hammond, stejně jako „pilotka“ manipulátoru Susan Helms byli v pohotovosti pro případ, že by měl Mark jakékoli potíže. Lee však s uspokojením mohl ohlásit, že SAFER „funguje naprosto suverénně (works like a champ)“. Lee i Meade mimo jiné zjistili, že spotřeba pohonného média zhruba odpovídá predikcím, dokonce je o něco málo nižší. Jedním z testů bylo i roztočení astronauta kolegou, stojícím na konci manipulátoru RMS. SAFER pak měl za úkol rotaci automaticky zastavit. Přestože v jednom případě Meade roztočil Leeho o něco rychleji, než bylo v plánu, SAFER situaci zvládnul na jedničku. Oba muži se v létání s jednotkou vystřídali a v průběhu EVA dokonce několikrát doplnili ze speciálního portu pohonné médium v nádržích SAFERu.
Druhá evaluace záchranné jednotky však už nedopadla tak dobře. Při letu STS-86 na podzim 1997 měl Scott Parazynski otestovat první sériový kus SAFERu (tentokrát pevně uchycen na konci manipulátoru RMS, protože orbiter Atlantis byl toho času zadokován u stanice Mir a případné manévry na záchranu astronauta tedy nepřipadaly v úvahu), ovšem selhání pyrotechnicky ovládaných ventilů, propojujících nádrže pohonného média a instalaci trysek, test zmařilo. NASA měla o čem přemýšlet.
Prototyp SAFERu použitý při misi STS-64
Zdroj: commons.wikimedia.org
Naštěstí při dalším testu v rámci mise STS-92 v říjnu 2000 už vše fungovalo uspokojivě. Peter Wisoff a Michael López-Alegría během čtvrté vycházky v rámci mise provedli test SAFERu, zaměřený na dvě oblasti: funkci ovládacího modulu SAFERu a translaci a lineární přesun z jednoho místa na druhé. Při testu byl vždy jeden z astronautů uchycen palubním manipulátorem RMS a jistil svého kolegu, mezi oběma bylo také nataženo jisticí lano (bylo nezbytné, protože orbiter Discovery tentokrát kotvil u vznikající stanice ISS). Během testů se astronauti dostali až na vzdálenost 16 metrů od raketoplánu. Misí STS-92 fáze evaluace a letových testů skončila a SAFER byl prohlášen za schopný operačního použití. Dnes už se žádný americký výstup bez SAFERu neobejde. Naštěstí zatím SAFER nikdy nemusel být použit při skutečné nouzové situaci, ovšem pocit přidaného bezpečí astronauti určitě vítají.
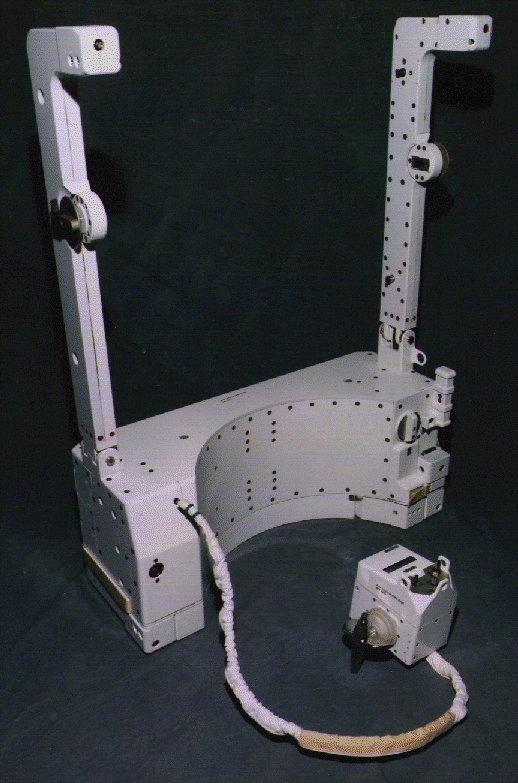
Pokud jsme nastínili historii vývoje SAFERu, bylo by vhodné představit si trochu blíže systém jako takový. SAFER má podobu malého batůžku se dvěma vertikálními „věžemi“ či rameny po stranách. Ramena lze pro skladování mezi výstupy složit, aby SAFER zabíral méně místa, jehož není nikdy dost ani v tak velkém stroji, jakým je ISS. Batůžek se připíná na spodní část batohu LSS a SAFER je na něm zajištěn v šesti úchytných bodech. Tyto úchytné body mimochodem batoh LSS obsahoval od počátku, proto nebyly nutné žádné jeho větší modifikace. Hmotnost SAFERu včetně náplní činí 37,7 kg.
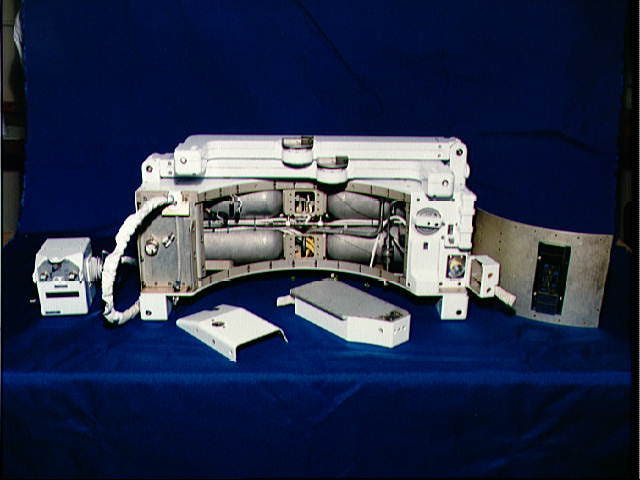
Vnitřní uspořádání SAFERu. Zřetelné jsou mimo jiné čtyři nádržky se stlačeným dusíkem.
Zdroj: capcomespace.net (kredit: NASA)
Srdcem SAFERu je pohonný systém. Ten funguje díky pohonnému médiu, jímž je 1,4 kg stlačeného dusíku ve čtyřech malých nádržích z nerezové oceli. Dusík je možné doplňovat přímo na orbitu. Z nádrží je plyn veden soustavou ventilů a reduktorů do systému trysek. Těch je celkem 24 (každá o tahu 0,35 kg) a zajišťují svobodu pohybu ve všech osách. Celková zásoba dusíku umožňuje teoreticky urychlit astronauta (při využití veškerého dostupného média pro urychlení v jedné ose) o 3,05 m/s. Aktivovány mohou být současně maximálně čtyři trysky, použití více trysek najednou by bylo kontraproduktivní. Přibližná doba předpokládané funkce pohonného systému (samozřejmě v závislosti na scénáři krizové situace) se pohybuje okolo 13 minut.
Jestliže srdcem SAFERu je pohonný systém, při obdobné analogii je pak mozkem zařízení avionický systém. Ten mimo jiné obsahuje také IRU („Inercial Reference Unit – inerciální jednotku“). IRU je osazena křemíkovými snímači úhlových rychlostí, jež jsou schopny zachycovat úhlovou rychlost až ± 30 °/s. Druhou hlavní součástí IRU jsou akcelerometry. Ty zase snímají zrychlení až 1 G v lineárním směru. Na rozdíl od předchozích designů (AMU, MMU apod.) tedy SAFER neobsahuje gyroskopy, jež sice zajišťují přesnější orientaci v prostoru, současně však mají větší nároky na elektrickou energii a jejich aktivace se neobejde bez prodlevy, jež může v případě extrémní nouze rozhodovat o úspěšnosti záchrany.
O přísun elektřiny se stará tzv. Battery Pack (sada baterií). V rámci Battery Packu bychom našli dvě sady článků – jedna (o napětí 30 – 57 V) se stará o napájení ventilů trysek. Kapacita této sady stačí na 1200 otevření ventilů, což koresponduje se čtyřnásobným využitím kompletního obsahu dusíkových nádrží. Druhá sada o napětí 16 – 38 V napájí zbývající subsystémy včetně avioniky. Kapacita tohoto obvodu stačí na zajištění funkce subsystémů po dobu 45 minut.
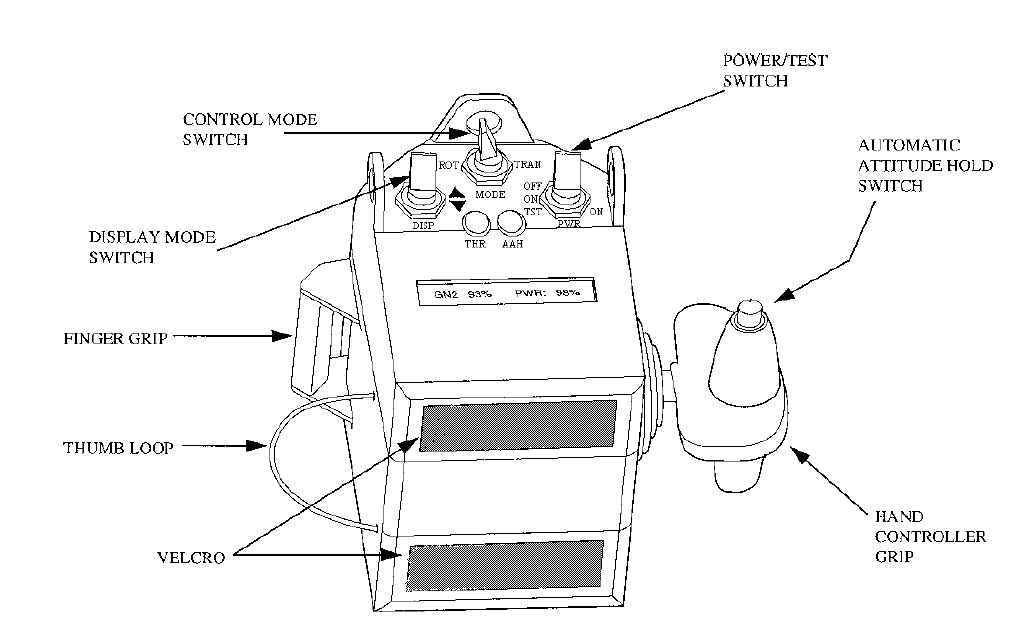
Ovládací modul HCM
Zdroj: ccar.colorado.edu (kredit: NASA)
Důležitou součástí SAFERu je také systém ovládání. Astronaut zařízení ovládá prostřednictvím malé krabičky, zvané „Hand Control Module (ruční ovládací modul)“. Při testování prototypu SAFERu při misi STS-64 byl HCM přichycen napevno k ovládací jednotce skafandru na hrudníku. U operačních kusů pak tento modul během výstupu zůstává uschován přímo v konstrukci SAFERu a je uvolněn až v případě potřeby. HCM slouží k ovládání SAFERu, ale také ke zobrazení několika základních údajů. To má na starosti miniaturní displej z tekutých krystalů, jenž zobrazuje například tlak dusíku, checklist pro otestování SAFERu nebo chybová hlášení. O informace pro astronauta se starají ještě kontrolka funkce trysek a kontrolka módu pro automatickou stabilizaci.
Ovládání pak astronaut provádí prostřednictvím několika přepínačů a jedné páčky. První přepínač slouží k zapnutí a vypnutí SAFERu, třetí poloha tohoto přepínače spouští testovací sekvenci. Druhý přepínač slouží k listování mezi zprávami na displeji. Třetí přepínač je zřejmě nejdůležitější a právě díky němu si astronauti při ovládání SAFERu vystačí s jedinou pákou. Přepínač je označen jako „Mode (mód)“ a má dvě polohy: „ROT“ a „TRAN“. Poloha „ROT“ je zkratkou rotace a „TRAN“ znamená translace. Astronaut tedy může v dané chvíli ovládat svůj pohyb pouze v rámci daného módu, což však není nic omezujícího – nezapomínejme, že SAFER je pouze nouzovým prostředkem a nepočítá se u něj s nějakými složitými manévry.
Ovládací páka na boku HCM je pohyblivá ve čtyřech osách. Pootočení po/proti směru hodinových ručiček (při pohledu z boku) aktivuje v obou módech klopení (tzn. rotaci kolem osy X); vychýlení nahoru/dolů v módu translace znamená pohyb nahoru/dolů (v módu rotace náklon doleva/doprava); vychýlení dopředu/dozadu znamená pohyb stejným směrem v obou funkčních módech a konečně zatlačení/zatáhnutí za páčku vyústí v módu translace v pohyb doleva/doprava (v módu rotace pak otočení doleva/doprava).
Velmi důležitou součástí ovládací páčky HCM je tlačítko, které aktivuje mód automatické stabilizace AAH (Automatic Attitude Hold – automatické udržování polohy). Aktivací stabilizace je SAFER schopen automaticky zastavit rotaci ve všech osách. Pokud je tlačítko stisknuto dvakrát během 0,5 sekundy, stabilizace je všech osách vypnuta. Pokud astronaut při aktivované stabilizaci pohne páčkou v libovolné ose, je u této osy stabilizace vypojena, zároveň však v ostatních osách zůstává aktivována. Režim stabilizace funguje za pomoci trysek (SAFER nemá žádný gyroskop, jenž by astronauta stabilizoval mechanicky), přičemž je schopen udržovat polohu v prostoru s přesností ± 2 °-5 °. Při zaznamenání rotace pálí rysky orientačního a pohonného systému nepřetržitě, aby rotaci zpomalily, jakmile úhlová rychlost klesne pod 0,3 °/s, trysky přejdou do krátkých pulzů, dokud otáčení nezpomalí pod hodnotu 0,2 °/s.
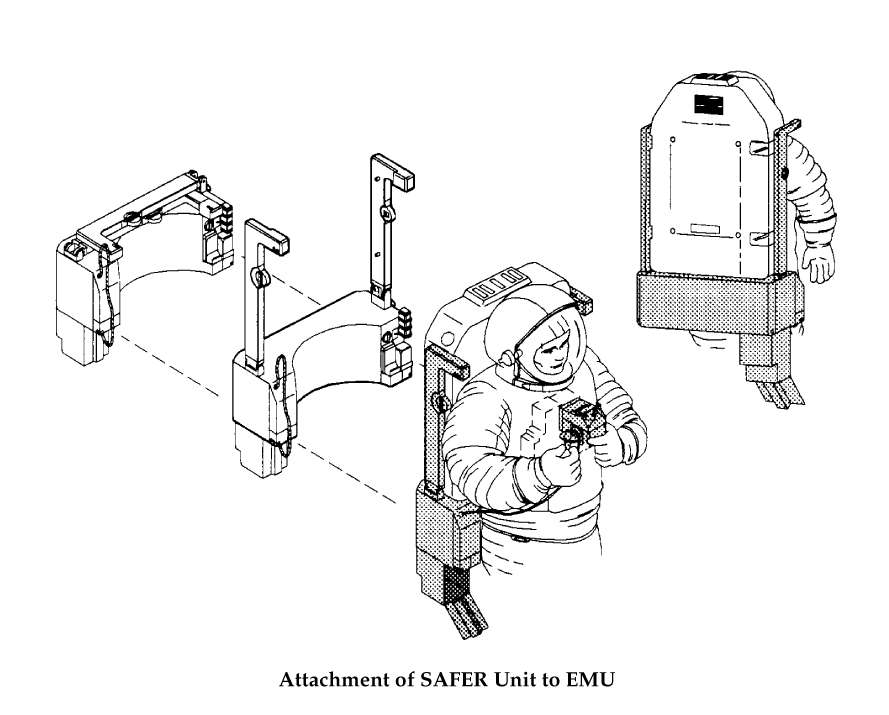
Postup při aktivaci SAFERu
Zdroj: capcomespace.net
Režim AAH má velmi důležitou roli v okamžiku aktivace celého systému. V případě nutnosti astronaut sáhne pravou rukou na čelní část SAFERu, kde je umístěna aktivační páčka. Tu vyklopí směrem vzhůru, což má za následek otevření schránky s HCM a jeho vysunutí vpřed před čelo SAFERu. Současně je automaticky aktivován režim stabilizace. Pokud se tedy astronaut nachází v obtížné pozici, kdy se teprve začíná orientovat v prostoru a ve svých problémech, systém mu zapnutím režimu stabilizace situaci nesmírně usnadňuje.
Není se však možné zcela vyhnout jistému zpoždění v reakcích astronauta a tím i v aktivaci SAFERu v případě potřeby. Nejhorší scénář, který astronauti nacvičují, počítá s 30 sekundami prodlevy mezi vznikem nebezpečné situace a reakcí astronauta. Dalších třicet sekund může trvat stabilizačnímu systému, než utlumí případné úhlové rychlosti. Podle některých studií může astronaut do té doby odlétnout až do vzdálenosti 45 metrů od stanice, přičemž rychlost rotace může v některých osách dosáhnout až 55 °/s. Vzhledem k relativně malému tahu trysek SAFERu by astronautovi ještě chvíli trvalo, než by se začal vracet zpět k místu, z něhož odlétl. Do věci se pak zejména u delších vzdáleností vkládá také orbitální mechanika a tím pádem mohou být úkony k sebezáchraně kontraintuitivní.

Terry Virts trénuje ovládání SAFERu na palubě ISS.
Zdroj: twitter (kredit: T. Virts / NASA)
Aby nebyli astronauti právě těmito okolnostmi překvapeni, pokud by krizová situace skutečně nastala, mají k dispozici přímo na stanici prostředky pro nácvik ve virtuální realitě. Ač slova „virtuální realita“ znějí relativně vznešeně, ve skutečnosti se jedná o laptop, na jehož monitor je připnut jakýsi „tunel“, na jehož druhý konec astronaut přitiskne svůj obličej. Laptop je propojen s ovladačem HCM a v simulačním programu jsou zahrnuty nejpravděpodobnější scénáře krizových situací.
Batoh SAFER je „poslední linií obrany“ pro astronauta v případě selhání jisticích pomůcek a je koncipován jako systém bez redundance, na rozdíl od svého vzdáleného předka MMU. S MMU ovšem sdílí některé konstrukční a systémové prvky, někdy je dokonce nazýván jako „malé MMU“. Přesto nedokáže zachránit astronauta za každé situace. Pro aktivaci SAFERu a jeho pilotáž je aktivita jeho nositele klíčová, což přináší jistá omezení. Není možná například záchrana v případě, že astronaut je v bezvědomí. Ale i na tomto scénáři se momentálně pracuje. Firma Jacobs (nezaměňovat s výrobcem cukrovinek a kávy!) vyvíjí společně s laboratořemi JPL systém dálkového ovládání SAFERu. Využívá při tom autodiagnostického režimu, který má SAFER standardně implementován a s pomocí nějž je možné po příslušných úpravách batoh ovládat na dálku prostřednictvím wifi sítě. Zajímavostí je fakt, že v momentální fázi testů je používán jako dálkový ovládací prvek ovladač k Xboxu!
Zatímco Američané mohou před EVA usínat s klidným pocitem, jejich ruští kolegové takové štěstí nemají. Skafandry Orlan nejsou kompatibilní s americkým SAFERem a proto se musejí kosmonauti spolehnout pouze na jisticí lanka a tkalouny s karabinami. Přesto ani Rusko nebylo v otázce bezpečnosti během EVA zcela nečinné.
V roce 1998 začala Zvezda rozpracovávat ruskou variaci na SAFER. Vývoj pomáhala financovat i NASA a výsledný produkt dostal název USK („Установка самоспасения космонавта – zařízení pro sebezáchranu kosmonauta“). Přestože v roce 2001 NASA svoji finanční pomoc tomuto projektu zastavila, o rok později bylo hotovo a Zvezda vyrobila tři exempláře určené k ostrému nasazení na ISS.

Záchranný systém USK
Zdroj: y-v-g.ru (kredit: Ю.В.Горбунов)
USK měla podobu jakéhosi „rámu“ o hmotnosti 55 kg (s provozními náplněmi), jenž se připínal na čtyři pevné body batohu skafandru Orlan-M. Oproti SAFERu nebylo třeba zařízení ze skafandru mezi výstupy demontovat – jeho konstrukce umožňovala údržbu skafandru i USK samotného v „letové“ konfiguraci. Rám mírně zvětšoval celkové rozměry kosmonauta a skafandru zejména co se týče šířky. To není u běžných průlezů jak na ruské, tak na americké přechodové komoře problém – mají průměr 1 metr. Přesto by bylo bývalo možné v případě nouze použít i vstup do stanice o šířce 80 cm (v úvahu přicházel například vnější poklop v orbitálním modulu Sojuzu).
Rám sestával ze čtyř konstrukčních celků. Levá svislá „věž“ rámu v sobě ukrývala nádržku s pohonným médiem. Pravá „věž“ obsahovala krom pneumatické a elektrické instalace také pultík ovládání USK. Ten byl umístěn na konci skládacího ramene s několika klouby a po ručním vyklopení jej kosmonaut měl přímo u hrudníku. Konstrukci doplňovaly dvě horizontální vzpěry nahoře a dole.
Pohonným médiem USK byl stlačený vzduch. Jeho zásoba 1,3 kg, uložená v nádržce pod tlakem 35 MPa, by dostačovala na celkové urychlení o 3,6 m/s. Vzduch byl hnán do šestnácti trysek o tahu 0,35 kg, rozmístěných tak, aby byla zajištěna svoboda pohybu ve všech osách. Po každém použití měla být nádržka vyměněna za novou. Elektrický systém USK byl, na rozdíl od amerického protějšku, napájen z baterií Orlanu.
Záchranný systém USK mohl fungovat ve třech módech. Prvním byl mód PAU („полуавтоматический режим управления – poloautomatický režim řízení“). V tomto módu byla automaticky zastavena rotace kolem všech os a kosmonaut byl stabilizován v prostoru s přesností na 5 °. Pakliže kosmonaut v tomto režimu změnil ručně výchylku v jedné z os, stabilizace kolem ostatních zůstala zachována. Druhý režim měl název NU („режим непосредственного управления – režim přímého řízení“). V tomto režimu byla kontrola nad sebou samým ponechána výhradně kosmonautovi a jeho zásahům do řízení USK. Poslední režim AU („режим аварийного управления – režim nouzového řízení“) byl identický s režimem NU, pouze povely a zásobování energií probíhaly odlišnými nezávislými cestami oproti běžnému provozu.

Celkový pohled na USK se skafandrem Orlan-M
Zdroj: zvezda-npp.ru (kredit: NPP Zvezda)
USK měl garantovánu životnost 5 let a minimálně 40 pracovních cyklů, přesto k jeho nasazení na ISS nikdy nedošlo. O jeho dopravu na stanici se měl postarat americký raketoplán, ovšem katastrofa Columbie při misi STS-107 všechny plány převrátila naruby a USK musely čekat na Zemi. V nákladních lodích Progress měl přednost jiný, důležitější náklad, který měly původně na stanici dopravit právě americké Shuttly. Situace se zásobováním byla lehce napjatá až do chvíle, než k ISS vzlétl po dvouleté pauze raketoplán znovu. Jenže v té době už byly letové exempláře USK za polovinou své životnosti a nadto o ně vlastně nebyl nijak valný zájem. Dnes je původní USK možné spatřit v například v muzeu NPO Zvezda. Jsou smutným pomníčkem ztracených let i financí.
V roce 2011 byly plány na zhotovení prostředku záchrany pro ruské kosmonauty obnoveny. Do roku 2013 se podařilo vyrobit tři nové, modernizované USK s menší hmotností a vylepšenými parametry. Ani tyto exempláře se však na palubu ISS zatím nedostaly. Mezitím započaly prvotní studie ohledně nové generace USK. Uvažuje se o integraci přímo do skafandru, další plány hovoří o plné automatizaci USK, o využití slunečních baterií pro napájení akumulátorů – plánů je jednoduše mnoho, otázkou však je, zda budou dovedeny ke zdárné realizaci. Zatím mohou před výstupy klidně spát pouze američtí astronauti, Rusové i nadále své životy svěřují plně pouze „do rukou“ poutacích lanek a karabin…
Člověka odjakživa lákala představa volného letu a neohraničené volnosti. Raketová křesla a pistole jej měly tomuto cíli přiblížit téměř nadosah. Ukázalo se však, že zatím pro ně nedozrála doba. Otázka financí, životnosti a koneckonců i využití zavedla raketové prostředky pro pohyb ve volném prostoru do přítmí muzeí, skladů a depozitářů. Jediným prostředkem, který je dnes používán, je americký SAFER, i ten je však pouze systémem pro případ nouze a nikdy nemusel být v praxi použit.
Při zmínce o výstupech do volného vesmíru člověku automaticky vytanou na mysli vědeckofantastické povídky a obrázky, ve kterých se odvážní muži a ženy prohánějí po nebesích i díky raketovým křeslům a raketovým pistolím. V koutku duše se mi chce věřit, že jejich čas ještě přijde. Protože bezpečný let nekonečnem kosmického prostoru bez jakéhokoli omezení zůstává jedním z největších nenaplněných snů milionů romantiků i vizionářů na celém světě…
Zdroje informací:
K.S.Thomas, H.J.McMann: „US Spacesuits“
I.A.Abramov, A.I.Skoog: „Russian Spacesuits“
J.M.Grinwood, B.C.Hacker, P.J.Worzimmer: „Gemini: A Chronology“
D.J.Shayler: „Gemini: Steps to the Moon“
kol. aut. „Gemini Mid Program Conference Including Experiment Results“
B.C.Hacker, J.M.Grimwood: „On the Shoulders of Titans: A History of Project Gemini“
kol. aut.: „From Engineering Science to Big Science: The NACA and NASA Collier Trophy Research Project Winners“
D.E.Hewes, K.E.Glover: „Development of Skylab Experiment T020 Employing a Foot-Controlled Maneuvering Unit“
L.F.Belew, E.Stuhlinger: „Skylab: A guidebook“
W.D.Compton, C.D.Benson: „Living and Working in Space: A History of Skylab“
R.W.Newkirk, I.D,Ertel, C.G.Brooks: „Skylab: A Chronology“
J.R.Tewell: „Astronaut Manuvering Research Vehicle“
kol. aut. „Skylab Mission Report: Second Visit“
kol. aut. „Skylab Mission Report: Third Visit“
kol. aut. „Manned Maneuvering Unit Mission definition Study, vol. I“
J.A.Lenda: „Manned Maneuvering Unit: User’s Guide“
kol. aut. „Independent Orbiter Assessment: Assessment of the Manned Maneuvering Unit“
kol. aut: „41-B Press information“
kol. aut: „Space Shuttle Mission STS-41B Press Kit“
kol. aut: „Space Shuttle Mission STS-64 Press Kit“
kol. aut: „Space Shuttle Mission STS-86 Press Kit“
kol. aut: „Space Shuttle Mission STS-92 Press Kit“
kol. aut. „Gemini X Press Kit“
kol. aut. „Engineering Challenges to the Long-Term Operation of the International Space Station“
S.J. Hofmann „Advanced EVA Capabilities: A Study for NASA’s Revolutionary Aerospace Systems Concept Program“
Aviation Week and Space Technology, roč. 1974, číslo 22
wikipedia.org
jsc.nasa.gov
heroicrelics.org
vokrugsveta.ru
npp-zvezda.ru
nasaspaceflight.com
americespace.com
collectspace.com
novosti-kosmonavtiki.ru
ccar.colorado.edu
Zdroje obrázků:
https://commons.wikimedia.org/wiki/File:Sunita_Williams_astronaut_spacewalk.jpg
http://spaceflight.nasa.gov/gallery/images/shuttle/sts-64/html/sts064-217-008.html (kredit: NASA)
https://commons.wikimedia.org/wiki/File:SAFER_-_Simplified_Aid_for_EVA_Rescue_2.jpg
http://ccar.colorado.edu/asen5050/projects/projects_2015/Students/Wray_Scott/img/Figure_3.png (kredit: NASA)
http://www.capcomespace.net/dossiers/espace_US/shuttle/sts/EMU_MMU/MMU%20Safer.jpg (kredit: NASA)
https://pbs.twimg.com/media/B-J2q-_CUAAaIZ9.jpg (kredit: NASA/Terry Virts)
http://y-v-g.ru/Tur/html/img/29.jpg (kredit: Ю.В.Горбунов)
http://www.zvezda-npp.ru/sites/default/files/styles/850×530/public/uploads/product_images/usk_1_1.jpg (kredit: NPP Zvezda)





 Rubrika
Rubrika  Štítky:
Štítky: 











I já se připojují k ocenění tohoto seriálu, skvěle vyvážený poměr technických informací, a čtivosti.
Diky
Díky moc za pochvalu, jsem rád, že si seriál i po takové době našel spokojené čtenáře. 😉
opět super článek, moc díky 🙂
k tématu: věřím, že MMU křeslo či jeho alternativy se budou používat čím dál víc. S rozšiřováním ISS (resp. po jejím nahrazení – už se něco ví?) budou přesuny po plášti časově pořád náročnější a Kanadarm nedosáhne všude.. Nějaká forma EVA batůžku s tryskama se nakonec ujme, ale ta pistole? 😀 Nechápu, že jim ten nápad vydržel tak dlouho… už jenom kvůli tomu, že se musí držet v ruce a těch máme dost omezený počet 😉
Díky moc!
Souhlasím s Vámi, že na křesla určitě ještě dojde. Jen je těžké říci kdy. A pistole – to byla absolutní minela (vždycky si vzpomenu na Gravitaci a záběr, jak Sandra Bullock letí k čínské stanici s hasicím přístrojem – kéž by to bylo takto jednoduché…).
ano, přesně tak, stejně jako Marťan s jeho „Iron Man pohonem“ při návratu na Hermes, jen Mark Watney s tím alespoň viditelně zápasil. Co naděláme, Hollywood na fyziku nehledí, aspoň že v knize nic takového není.
Hned, jak jsem dopsal svůj komentář, na Watneyho jsem si vzpomněl… 😀
Opět excelentní ,děkuji za Vaší práci a doufám že po odpočinku (snad to psychycky přežijeme) vytáhnete opět nějaké téma ,které se vašim perem stane zajímavým a poutavým čtením. Děkuji !!!
Díky moc! Nečekal jsem, že se tento seriál bude až tak líbit, je to přeci jen trochu více technicistní, než třeba VO.
A stran dalšího seriálu – už začínám nenápadně uvažovat, jaké téma by mohl mít… 😉
Skvělá série, laťka se drží vysoko a pevně! 🙂
Díky.
Moc děkuju, cením si toho!
Děkujeme za seriál, opět vynikající práce 🙂
Díky moc! Zpočátku jsem se bál, zda to nebude nuda, tak snad nebyla. 😀
No prave tu vam musim vyseknut poklonu, ze ste schopny pisat jeden serial za druhym a kazdy jeden ma zaujimavu temu a je napisany velmi dobre sa citajucim stylom. To sa podari malokomu 🙂
Moc děkuju, vážím si toho. Ovšem teď už si nějakou tu pauzu přeci jenom dám, tak snad budou mé články „čitelné“ i po ní… 😀
Pod textem chybí poznámka, že článek má pokračování.
Nechybí. Vyčerpal jsem jak téma, tak sebe. 🙂
Chybí. Chápu proč tam není, nic to nemění na tom, že tam chybí 😉 Díky za další pěkný seriál.
Díky, jsem rád, že Vás seriál „chytnul“! 😉