Když jsme Vám na začátku listopadu přinesli článek o kamerách pro nový americký rover, který v roce 2020 vyrazí k Marsu, slibovali jsme, že se časem na jednotlivé kamery podíváme trochu detailněji. V dnešním článku rozebereme kamery, které nebudou využitelné pro vědecký výzkum, přesto jsou pro celou misi velmi důležité. Řeč bude o kamerách, které mají monitorovat sestup celé sestavy vstříc povrchu Marsu a také kamerám, které využijí plánovači tras. Za pár týdnů bychom na tento článek chtěli navázat dalším dílem, který se má věnovat vědeckým kamerám.
Sestupové kamery
Možná Vás někdy napadlo, co by z okének přistávacího modulu viděli astronauti, pokud by mířili vstříc přistání na Marsu. Když v roce 2012 přistával rover Curiosity, nesl s sebou kameru MARDI (Mars Descent Imager), která natáčela sestup a přistání vozítka. Z jejích dat dokázali inženýři vyčíst mnoho informací pro pochopení procesů, které se odehrávaly během nejkritičtější fáze celé mise. Kamera MARDI natáčela barevné video, které se dalo využít k přesnému určení místa přistání i k naplánování prvních jízd.
Na Mars rover 2020 umístili inženýři i další kamery, které mají podobný úkol. Bonusem bude i mikrofon, protože zvuk ve výše vloženém videu není původní a byl přidán až při střihu na Zemi. Více kamer a mikrofon tak společně pomohou k pokrytí celého přistání s ještě vyšší úrovní detailů. Dnes již asi nikoho nepřekvapí, že kamery budou barevné a mají natáčet celou fázi sestupu k povrchu. Kamery přitom budou mířit různým směrem – některé k obloze, jiné k povrchu. Tyto oči a uši využívají relativně běžně dostupný hardware, čemuž odpovídá i jejich klasifikace. Patří mezi vybavení, které může být užitečné, ale pro celou misi nejsou klíčové.
Odborníci očekávají, že sestava kamer pomůže vytvořit historicky nejlepší záznam událostí během sestupu tělesa na povrch Marsu. Každá kamera má svůj úkol a do skupiny sestupových kamer řadíme tyto konkrétní systémy:
- Vzhůru mířící kamery sledující nafouknutí padáku
- Dolů mířící kamera na sky-crane – nabídne pohled na rover z nadhledu
- Vzhůru mířící kamera na roveru – nasnímá sestupový stupeň během sestupu roveru na systému sky-crane
- Dolů mířící kamera na roveru pro sledování terénu
Kromě toho, že tyto kamery poskytnou údaje pro inženýry, NASA cítí i jejich popularizační potenciál, protože umožní veřejnosti „zažít“ přistání na Marsu. Ještě než přistával rover Curiosity, byla vizualizace jeho sestupu nazvaná Sedm minut hrůzy velmi virální a to šlo jen o počítačovou simulaci. V historii ještě nikdo neviděl otevření padáku v atmosféře Marsu, nebo jak rover sestupuje k povrchu zavěšený na lanech ze sky-crane. Záznam by mohl poomoci odpovědět na mnoho otázek:
- Co se stane po dosednutí vozítka?
- Kolik písku a kamenů se zvíří do atmosféry od přistávacích motorů?
- Jak se přistávací systém pohybuje během přibližování k povrchu?
- Jak kola a jejich zavěšení reagují, když na ně rover přenese svou hmotnost?
Inženýrské kamery
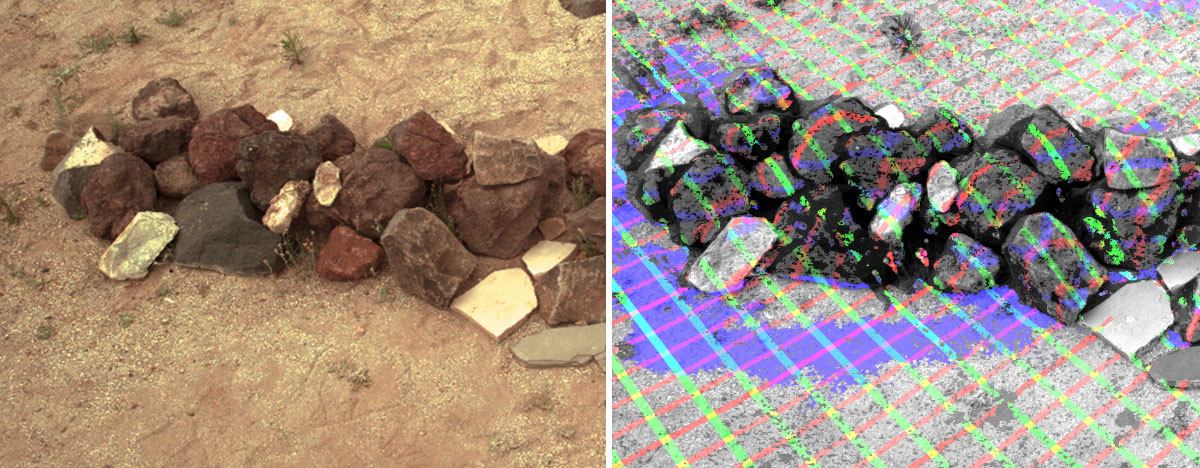
Jak jsme si řekli už u minulého článku, rover vypuštěný v roce 2020 ponese hardware, který bude oproti Curiosity značně modernizován. Asi nejlépe je to vidět právě na kamerách, které se označují jako inženýrské. Ty staví na odkazu techniky z roveru Curiosity, ale přináší mnohá vylepšení, díky kterým budou schopné pořídit snímky z okolí roveru s více detaily a navíc barevně. Jejich úkoly jsou široké – od sledování terénu v okolí pro bezpečnou jízdu, přes kontrolu hardwaru vozítka až po kontrolu odběru vzorků. Snímky se navíc dají použít i pro vytipování zajímavých lokalit pro bližší výzkum.
Snímky z kamer ale hlavně pomohou pozemským operátorům mnohem přesněji plánovat jízdu vozítka, ale také zacílit pohyby robotického ramene s vrtačkou a dalšími přístroji. Široké zorné pole navíc pokrývá i větší část samotného roveru, což se hodí při kontrolách technického stavu různých systémů, ale i pro monitorování množství prachu, který pokrývá povrch vozítka. Velkou výhodou je, že nové kamery budou schopné pořizovat fotky během pohybu roveru.
Zdroj: https://ipon.hu
Každá kamera váží lehce pod 425 gramů a poskytne snímky s rozlišením 5120 × 3840 obrazových bodů. Inženýrské kamery mají shodné vnější tělo, ale liší se od sebe použitými čočkami, které odpovídají požadavkům na danou kameru. Inženýrské kamery na tomto vozítku můžeme podle určení rozdělit do tří velkých okruhů:
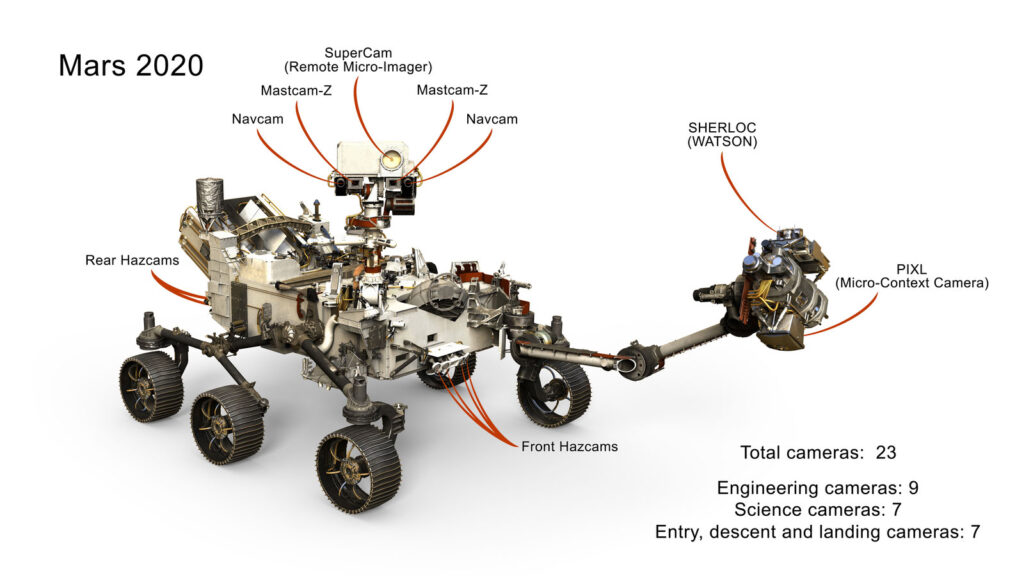
- Kamery pro sledování překážek (HazCam)
- Navigační kamery (NavCam)
- CacheCam
HazCam
Na Mars roveru 2020 najdeme šest nově vyvinutých kamer pro sledování překážek (HazCam) – čtyři budou v přední části vozítka a dvě pak vzadu. Zorné pole kamer je lehce skloněné k povrchu, aby byl zajištěn dobrý přehled o překážkách. Kamery jsou umístěné zhruba 68 centimetrů nad úrovní terénu.
Úkolem těchto kamer je sledovat, zda se v cestě vozítka nenachází nebezpečné překážky jako jsou kameny, příkopy, nebo písečné duny. Inženýři by rádi využívali předních kamer HazCam k přesným měřením polohy robotického ramene v prostoru, což se bude hodit při odběrech horninových a písečných vzorků.
Při jízdě se rover občas zastaví, aby pořídil sérii snímků pro stereofotku, kterou následně vyhodnotí z hlediska rizika. Díky těmto trojrozměrným snímkům získá vozítko možnost dělat vlastní rozhodnutí, zda může pokračovat v jízdě bez nutnosti konzultovat každý pohyb s týmem specialistů na Zemi.
NavCam
Dvě sady barevných stereo navigačních kamer pomůže inženýrům plánovat cestu pro vozítko a v době autonomního pohybu pak operační systém využije jejich snímky pro vlastní řízení jízdy bez nutnosti konzultace se Zemí. Stejně jako v případě vozítka Curiosity najdeme kamery NavCam v horní části hlavního stožáru – pokud použijeme personifikaci, pak můžeme říct, že se nachází na hlavě vozítka, přičemž obě oči od sebe dělí 42 centimetrů. Jedná se o černobílé kamery, které dokáží na vzdálenost 25 metrů zaznamenat drobný objekt o velikosti golfového míčku.
S těmito kamerami bude možné sáhnout k režimu tzv. slepé jízdy (blind-drive). Při ní operátoři zadají roveru, že má daným směrem ujet určitou vzdálenost. Navigační kamery v takovém případě nasnímají směr jízdy a počítač určí bezpečnou dráhu. Zároveň vypočítá počet otáček kol nutných k ujetí vzdálenosti. S tímto údajem pak nadále pracuje a není potřeba kontrolovat průběh jízdy nebo prokluz kol.

Zdroj: https://mars.nasa.gov
CacheCam
V případě kamer HazCam a NavCam šlo o vylepšené verze technologií, které byly již na roveru Curiosity. U kamery CacheCam se však jedná o zbrusu nový systém. Jedná se o jedinou kameru, jejíž zorné pole míří dolů směrem k místu, kam se budou ukládat vzorky. Jejím úkolem je fotit nasbírané materiály a trubice s nimi, během přípravy na zapečetění a uzavření těchto trubic. Díky snímkům z této kamery budou mít vědci a inženýři dobrý přehled o odebraných vzorcích. Důležité je i to, že díky této kameře bude k dispozici záznam manipulace s každým odebraným vzorkem.
Tyto trubice se vzorky se totiž umístí na povrch Marsu, kde budou čekat na budoucí misi, která je sebere a postará se o jejich přepravu na zemi, kde bude možné materiál důkladně prozkoumat v laboratořích. Mars rover 2020 tak hraje důležitou roli prvního článku v této komplexní a dlouhé roky očekávané misi.
Zdroje informací:
https://mars.nasa.gov/
Zdroje obrázků:
https://mars.nasa.gov/mars2020//imgs/2017/10/mars_2020_cameras_labeled_web-full2.jpg
https://ipon.hu/_userfiles/Image/joker/hirek/2017/1102/enhanced-engineering-camera.png
https://mars.nasa.gov/mars2020/imgs/2017/07/Mars2020-CacheCam-sampletube-br.png



{kind=link}
{kind=link}
{kind=link}
Doufám, že se to všechno povede.
První krok 2020 a druhý ? Kdy ?
Pokud jsme u MSL stanuli v úžasu, co se stane teď? Video ukazující sky crane vznášející se nízko nad povrchem s pracujícími tryskami a další, které naopak předvede rover z nadhledu, jak dosedne a odpálí lana. Poté tedy sky crane pravděpodobně rychle zmizí ze scény a bude po podívané, ale celkově když to celé vyjde… nemůžu se dočkat. K tomu ještě záběry na padák a audio přenos celé operace. To tedy bude něco… 🙂
Zajímalo by mě, jak mají vyřešeno případné hledání odložených vzorků. Vždyť za tu dobu, než se tam dostane “sběrná” mise, budou muset být zafoukané prachem a pískem.
K odložení se vybere vhodné místo a navíc ty přesuny prachu a písku na Marsu nejsou tak hrozné.
Už aby to bylo. Zatím mě jímá přirozeně pesimistická hrůza, že se všichni budou těšit, chladit šampaňský a pak se to posere a druhá serie z produkce JPL se neodehraje.
Bylo by vhodné použít pro boční nasvícení LED reflektory, aby snímky nebyly kontrastně stínované.
Pane Výprachtický, já poslední dobou nějak hůř chápu Vaše sdělení – boční nasvícení čeho? .. snímky osvícené LED jsou míň kontrastní ? Děkuji. 🙂
Fklidu. On jen chce aby tam byl předem štáb z National Geographic 😉
Třeba ho tam SpX dopraví.
Re. Fantasta- Vozítko Rover je vybaveno nejednou kamerou, proto uvádím boční nasvícení pro lepší rozeznatelnost detailů na povrchu. Přeji více fantazie i panu droidovi.
Tak ještě jeden dotaz ( já jsem dnes fakt natvrdlý) – myslíte LED reflektory, aby líp bylo vidět na cestu? Nebo reflektory u kola, zboku ?
Moje fantazie nezná mezí, ale chtěl bych vědět, jak si představujete Vy tu realizaci. 🙂
Zdá se mi to nebo skycrane uvolnil Curiosity pár centimetrů nad povrchem?
Jinak jak je vidět do budoucna na Marsu bude čím dál více zařízení a to s čím dál více kvalitnějšími přístroji, což přináší jednu nevýhodu a tou je potřebná datová přenosová rychlost mezi Zemí a Marsem. Plánuje se přidat ke stávajícím družicím kolem Marsu nějaké přídavné retranslační/vědecké družce?
Časem se určitě plánují další družice, které mají nahradit ty stárnoucí, takže dojde k vylepšení jejich schopností a možností.
About 60 feet (18 m) above the surface, MSL’s „skycrane“ deployed. The landing assembly dangled the rover below the rockets using a 20-foot (6 m) tether. Falling at 1.5 mph (2.4 kph), MSL gently touched the ground about the same moment the skycrane severed the link and flew away, crashing into the surface.
https://www.space.com/17963-mars-curiosity.html
Podle čeho tak usuzujete? Na sestupovém videu podle mého názoru nic takového vidět není. Lana se měla odpálit až po kontaktu s povrchem, ale je pravda, že ani pár cm by rover asi neohrozilo. I vzhledem k nižší gravitaci by to úspěšně „odpružila“.
Já soukromě podezřívám Muska, že tam plánuje nějakou menší konstelaci vypustit. Ale nejsem si vědom, že by o tom kdy mluvil.
Zdá se,že na použití nových drátěných kol je již pozdě. Snad to nebude takové drama jako s Curiosity,byť se bojuje o každý gram,stacionární stanice by byla nemilá.
S drátěnými koly se u tohoto roveru nikdy nepočítalo. Viz starší článek: https://kosmonautix.cz/2016/03/testy-kol-pro-pristi-rover/
Jo,jen že je to škoda,váha nemusela jít nahoru a nebylo by třeba bát se kamenů. Počítám,že bez ohledu na současné změny u kol si na kameny budou muset dále dávat zvýšený pozor.
To je naprosto neskutečné video!!
Díky za článek – jen trochu nerozumím tomuto: „Navigační kamery v takovém případě nasnímají směr jízdy a počítač určí bezpečnou dráhu. Zároveň vypočítá počet otáček kol nutných k ujetí vzdálenosti. S tímto údajem pak nadále pracuje a není potřeba kontrolovat průběh jízdy nebo prokluz kol.“
Jestli je trasa (její vzdálenost a směr) předem určena pouze počtem otočení kol, tak se mi zdá, že tím tuplem JE třeba kontrolovat jestli se jedna strana třeba nesvezla nebo neprohrábla a „kára“ nejede úplně jinam…?
Osobně se domnívám, že počítač bude sledovat pohyb roveru z fotek pořízených během jízdy a po dojetí určí, zda je tam, kde měl být. Pokud ne, znamená to, že došlo k prokluzu a bude potřeba ještě kousek popojet. Ale je to jen můj dojem.
Právě, jestli už nebude pozdě 🙂 Dovedu si představit nějakou „inerciální“ navigaci, kdy:
– počítač podle fotografií určí trasu a počet otoček kol a předpokládané hodnoty zrychlení ve všech třech osách a čase
– vozejček jede sice „naslepo“ ale gyra dodávají údaje o pohybu v prostoru a údaje z gyr jsou porovnávány s předem připravenou „obálkou“ povolených pohybů k dosažení vytyčené trasy
– po dokončení trasy dojde k porovnání záměru a dosaženého cíle
Když vidím, co dnes dokáží gyra snímat za drobné změny pohybů v oblasti RC modelařiny a spotřební elektroniky, tak hoši z NASA musí mít k dispozici úplně jiný level 🙂
Ale věřím tomu, že to mají zmáklé.
Budu opět spekulovat, takže se omlouvám, za případné nesrovnalosti. Myslím si, že během jízdy bude hlavní počítač spoléhat i na kamery HazCam, ze kterých si vytvoří model okolí a bude predikovat překážky na trase, aby mohl upravovat jízdní dráhu v případě nenadálých problémů na cestě.
OK, děkuji za upřesnění. Tak hlavně aby „skájkrejn“ fungoval i teď.
Kára, vozejček… co tam máte dál? 🙂
Jak vozejček? Podle počtu končetin je to evidentně hmyz. Ale spouští se to na vlákně, takže pavouk. A 23 očí… to nejdete leda na polévce. 🙂
Těch metod budou mít určitě víc v zásobě a budou se dopňovat nebo nahrazovat podle situace.
Co tady máte všichni proti vozejčku? Ale vozidlo je lepší a odpovídá to tomu anglickému „rover“.
……Marsochod taky není špatné… 🙂
Mě by hrozně zajímalo, jestli při designování těch ponechaných pouzder pro „pozdní sběr“ už mají nadesignován a ověřen i ten „zbytek“, tedy ten mechanismus sběru. Aby pak nezjistili, že „to nemají za co chytit“ 🙂
Samozřejmě předpokládám, že to je všechno zmáknuté a ověřené, jen by mě zajímala nějaké animace toho kukavozu co ty popelničky bude sbírat a systém toho sběru.
Nic, jen mě pobavilo, jak RiMr ve dvou po sobě jdoucích příspěvcích použil jednou káru a podruhé vozejček 🙂 Ale proč ne. Jinak já osobně používám u aparátů jezdících mimo Zemi výhradně rover. Líbí se mi asi nejvíc. A přiznám se, že např. zde hojně používané vozítko mi připadá děsné.
…když ve mě jako skautovi vyvolává výraz „Marsovský rover“ představu přestárlého skautíka jak zadržujíc dech hloubí studánky na úpatí Olympus Mons… 🙂
Taky jsem zvědavý na finální podobu kol, resp. jejich plášťů, po zkušenostech s CUriosity a „defekty“ co schytala..
A jo. To jsem si nikdy nespojil. I když třeba Roverské patrioty znám 🙂
Pokud jde o ta kola, tak se mi nechce věřit, že by konstruktéři po jasných důkazech o problematičnosti pláštů MSL nezměnili technologii. Tedy pokud to vyhodnotí jako nutné. Kola MSL sice dostávají zabrat, ale jejich kostra drží dobře. Asi jde opravdu především o hmotnost a ta má vysokou prioritu.
Jsem zvědavý, jestli se někdy dočkáme kráčejících „chodítek“… Jestli někdy výhody převáží nad komplikovaností a určitě vyyšším rizikem poruchy tohoto způsobu přesunu..
No, myslím, že do téhle diskuze to celkem zapadne.
Celé to autonomní řízení zní dost výpočetně náročně, aspoň teda na kosmickou techniku. Jsou i nějaká vylepšení na palubním počítači?