
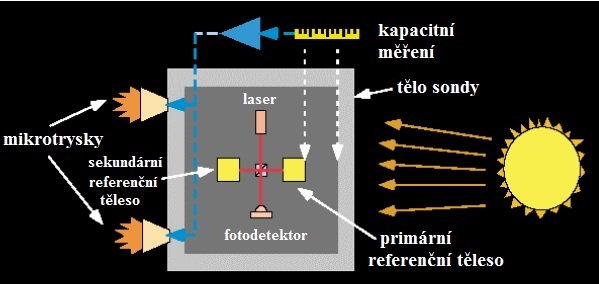
LISA Pathfinder je technologický demonstrátor pro budoucí velkou misi nazývanou eLISA (Evolved Laser Interferometr Space Antenna), která bude zkoumat gravitační vlny a její start je plánován až na první polovinu třicátých let. Tak vzdálené datum startu je odůvodněno vysokou náročností a vyspělostí konstrukce sondy. Některé technologie, které má eLISA nést na své palubě je ještě potřeba doladit a zjistit, které z možných provedení je to nejvhodnější. Jiné technologie dokonce ještě ani nebyly vyvinuty. A právě na jeden z klíčových komponentů se podíváme v dnešním Pohledu pod kůži. V tomto článku podrobně rozebereme konstrukci mikrotrysek sloužících k přesnému udržování polohy sondy LISA Pathfinder v prostoru. S hrdostí můžeme říci, že na vývoji a výrobě této vysoce vyspělé technologie mají své otisky i zlaté české ručičky.
LISA Pathfinder je společným projektem ESA a NASA. Obě agentury nezávisle na sobě vyvíjely technologie mikropohonů, které měly společně letět na palubě LISA Pathfinder a bylo tak zjištěno, která technologie je vhodnější pro budoucí sondu eLISA. ESA vyvíjela trysky FEEP (Field Emission Thruster System) zatímco NASA vyvíjela koloidní trysky (colloid/electrospray thruster) v rámci programu Space Technology 7 – Disturbance Reduction System (systém redukce rušení) (ST7-DRS), který vedla věhlasná laboratoř JPL (Jet Propulsion Laboratory).
V roce 2002 JPL udělila firmě Busek Co. Inc. kontrakt na vývoj koloidních mikrotrysek (CMNT – Colloid Micro-Newton Thrusters) schopných splnit požadavky mise LISA Pathfinder, a na dodání tohoto letového hardwaru do JPL. Cílem programu ST7-DRS bylo: 1) testování řízení trajektorie referenčního tělesa, která se odchyluje od čistě gravitační trajektorie méně než 3×10-14 m/sec2/Hz0.5 [1+(f/3 mHz)2] ve frekvenčním rozpětí od 1mHz po 30mHz; a 2) řízení orientace sondy v rámci 10nm/Hz0,5 ve stejném frekvenčním rozpětí. K uskutečnění těchto dvou cílů firma Busek vyvinula pohonný systém na bázi CMNT, Goddardovo středisko NASA vyvinulo řídící software, a nakonec laboratoř JPL vyvinula integrovanou jednotku avioniky (IAU – Integrated Avionics Unit) a navíc celý systém integrovala do jednoho celku. Výsledný produkt měl být dodán Evropské kosmické agentuře v roce 2008.
Zdroj: Dr. Folkner, JPL
Mikrotrysky CMNT vyvíjejí tah díky urychlování nabitých částic obecně označovaných jako koloidy: právě proto jsou tato zařízení označována jako koloidní trysky. Firma Busek se začala zabývat vývojem koloidních trysek krátce po roce 2000. Koloidní trysky produkují proud nanokapiček (solvatovaných iontů), které jsou elektricky nabité a urychlované elektrickým polem, díky čemuž generují tah. Jsou ideální pro velice přesné mikrozážehy jejichž tah se může pohybovat od pouhých mikronewtonů po několik málo milinewtonů. Pro silnější zážehy jsou vhodnější jiné typy elektrostatických trysek.
Představte si trubičku s velice malým průměrem naplněnou kapalinou s vysokou stálostí (Obr. 2). Obecně platí, že čím menší je průměr trubičky, tím lépe. Avšak praktické důvody limitují vnitřní průměr trubičky na několik desítek mikronů. Kapalina musí být v termodynamické rovnováze s párou o stejné teplotě a tlaku, aby se minimalizovalo její vypařování při expozici vesmírnému vakuu. Měla by také mít konduktivitu (měrnou elektrickou vodivost), která činí alespoň zlomek hodnoty 1 Si/m nebo vyšší (konduktivita mořské vody je přibližně K ≈ 5 Si/m). Ideálně by měla mít kapalina vysokou hustotu kvůli úspornosti objemu nádrží, zatímco viskozita a povrchové napětí by měly být porovnatelné s vodou.
Iontové tekutiny, které jsou solemi rozpuštěnými při pokojové teplotě, tyto obecné požadavky splňují. Jelikož byly vyvinuty pro kapacitní skladování energie a pro elektrolyty baterií, mají vysokou elektrochemickou stabilitu překonávající 4 volty.
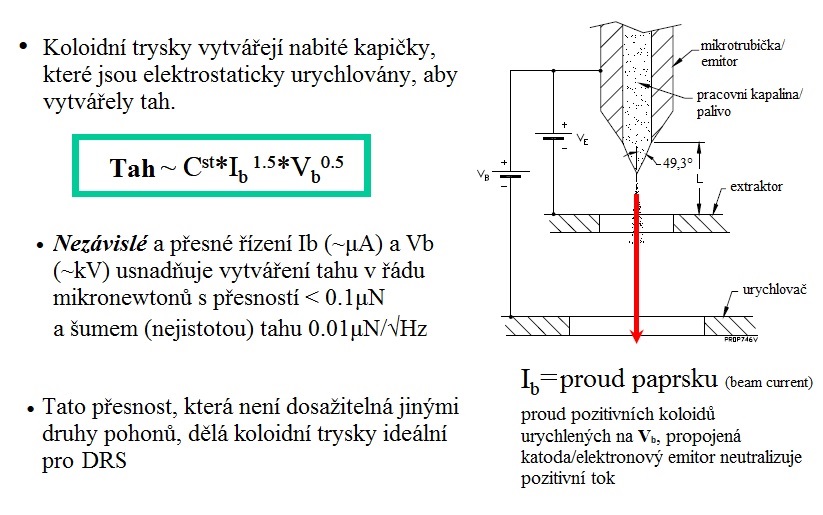
Když je mezi extraktor a mikrotrubičku (emitor) aplikováno dostatečné napětí, povrch kapaliny mění tvar do kužele, jak je vidět na obrázku 2. Geoffrey Ingram Taylor zjistil, že tento kužel má stabilní úhel 49,3° nehledě na typu kapaliny, její přesné vlastnosti nebo tvar emitoru. Rovnováha na povrchu kužele je udržována vyvážením povrchového napětí kapaliny a elektrostatického tlaku. V okolí špičky kužele je elektrické pole (~CV/Rtip kde C je konstanta závislá na geometrickém uspořádání, V je aplikované napětí a Rtip je poloměr zakřivení špičky kužele) zintenzivněno na takovou hodnotu, které nemůže povrchové napětí klást odpor a špička kužele přechází do proudu malého průměru, který se rozpadá na nabité kapičky.
Stabilní proud Taylorova kužele je udržován poměrně malým rozsahem napětí na extraktoru (Ve na Obr. 2 s hodnotami typicky mezi 1,4 a 2 kV). DRS vyžaduje velice vysokou stabilitu tahu, a proto musí být napětí extraktoru udržováno konstantní. K získání většího urychlení koloidů je přidána další elektroda – urychlovač, který je připojen ke zdroji variabilního napětí (napětí paprsku Vb na Obr. 2). Proměnné napětí paprsku poskytuje variabilní tah (T) a specifický impuls (Isp). Hmotnostní průtok paliva (ṁ) může být měněn nezávisle. V DRS je využíváno regulačního mikroventilu, což umožňuje nezávislé řízení tahu a specifického impulsu díky změnám napětí paprsku a hmotnostního průtoku paliva. Předpokládáme-li stabilní fungování kužele a následného proudu, základní vztahy proudu paprsku pak jsou (Ib)~ṁ1/2, T~ Ib3/2Vb1/2, Isp~(Vb/Ib)1/2.
Přesné a nezávislé řízení proudu paprsku (Ib) a napětí paprsku (Vb) umožňuje koloidní trysce široký operační rozsah a nebývalou přesnost tahu s nízkým šumem (nepřesností) tahu.
Shrnutí návrhu pohonu ST7-DRS, požadavky a výkony
Každá koloidní tryska systému DRS musí poskytovat tah v rozmezí 5 – 30 μN, tah v v tomto rozsahu musí být plynule regulovatelný a jeho přírůstek musí být menší než 0,1 μN s vytvářeným hlukem na úrovni menší než 0,1 μN/√Hz ve frekvenčním intervalu od 1mHz po 4Hz. DRS využívá 8 koloidních trysek uspořádaných do dvou svazků. Každá tryska má nezávislou nádrž paliva, řídící podsystém a jednotku zpracování energie (PPU – Power Processing Unit). Každý svazek má jednotku digitálního rozhraní a řízení (DCIU – Digital Control and Interface Unit), která získává příkazy pro zážehy z integrované jednotky avioniky (IAU – Integrated Avionics Unit) a odesílá je v analogové formě do příslušných PPU/trysek v rámci svazku. Každý svazek má také katodu emitující elektrony založenou na karbonových nanotrubičkách, která umožňuje neutralizaci náboje pozitivně nabitého proudu koloidů. Neutralizér však možná nemusí být potřebný, jelikož očekávané fotoemise ze solárních panelů na oběžné dráze mohou být dostatečné k neutralizaci paprsků.
Dynamický rozsah tahu v poměru 6:1, nepřetržité upravování tahu a hlukové požadavky představují unikátní výzvy, které vyžadují značný pokrok v určitých technologických oblastech včetně extrémně přesného řízení proudění paliva (<0,01 μl/min), bezhlučného měniče vysokého napětí DC/DC (<10 kV) a stabilní koloidní emise (<0,1 μN). Požadavky nejvyšší úrovně a prokázané výkony trysek jsou shrnuty v Tabulce 1.
| Požadavky | Prokázané výkony | |
|---|---|---|
| Rozsah tahu | T = 5-30 μN (Tmax/Tmin = 6) | T = 5–35.8 mN >36 μN krátkodobě (Tmax/Tmin~7) |
| Citlivost tahu a regulovatelnost | ΔT ≤ 0.1 μN | ΔT ~ 0.01 μN |
| Šum tahu | ΔT ≤ 0.1 μN ve frekvenčním pásmu 1 - 4 000 mHz | ΔT ≤ 0.01 μN ve frekvenčním pásmu 1 - 3 000mHz a ΔT ≤ 0.1 μN ve frekvenčním pásmu 3 000 to 4 000mHz |
| Životnost a počet možných cyklů | 2 200 provozních hodin, 10 zapnutí/vypnutí | 3 500 provozních hodin a stovky zapnutí/vypnutí |
| Specifický impuls | >150 sec | 240 sec 400 sec při specifických provozních podmínkách |
| Výtokový poloúhel | <35° při 95% proudu paprsku | <23° |
Systém kolodiních mikrotrysek CMNT
Svazek trysek (Obr. 3) obsahuje 4 identické systémy trysek, kde se každá tryska skládá ze samotné koloidní trysky CMNT (Colloid Micro-Newton Thruster), která má interní ohřívač, piezoelektrický mikroventil regulující proud paliva, měch s palivem a jednotku zpracování energie PPU. Svazek dále obsahuje jednotku digitálního rozhraní a řízení DCIU, která obsahuje mikroovladač a DC-DC měnič. Pro všechny čtyři trysky ve svazku je zde jeden neutralizér na bázi karbonové nanotrubičky emitující elektrony.
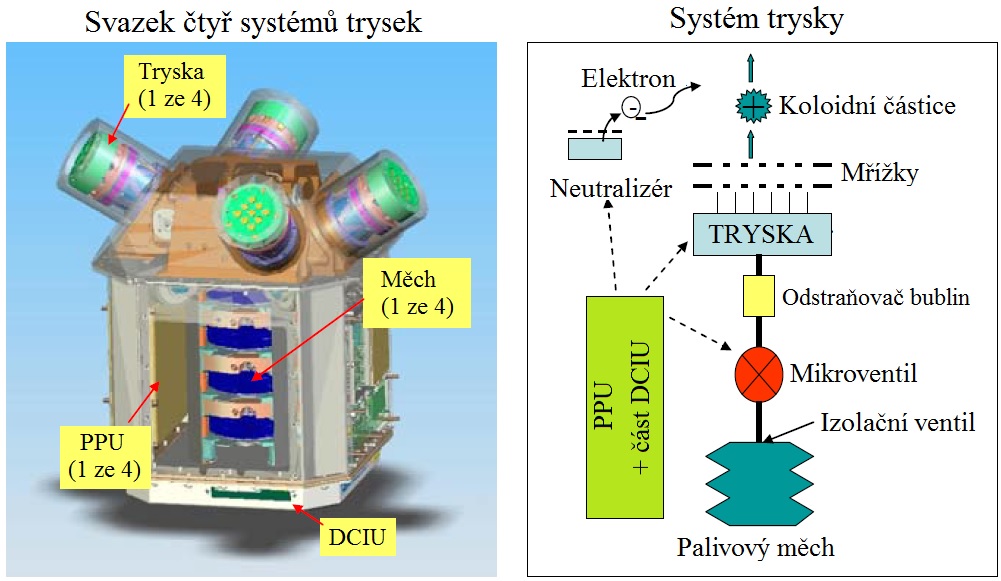
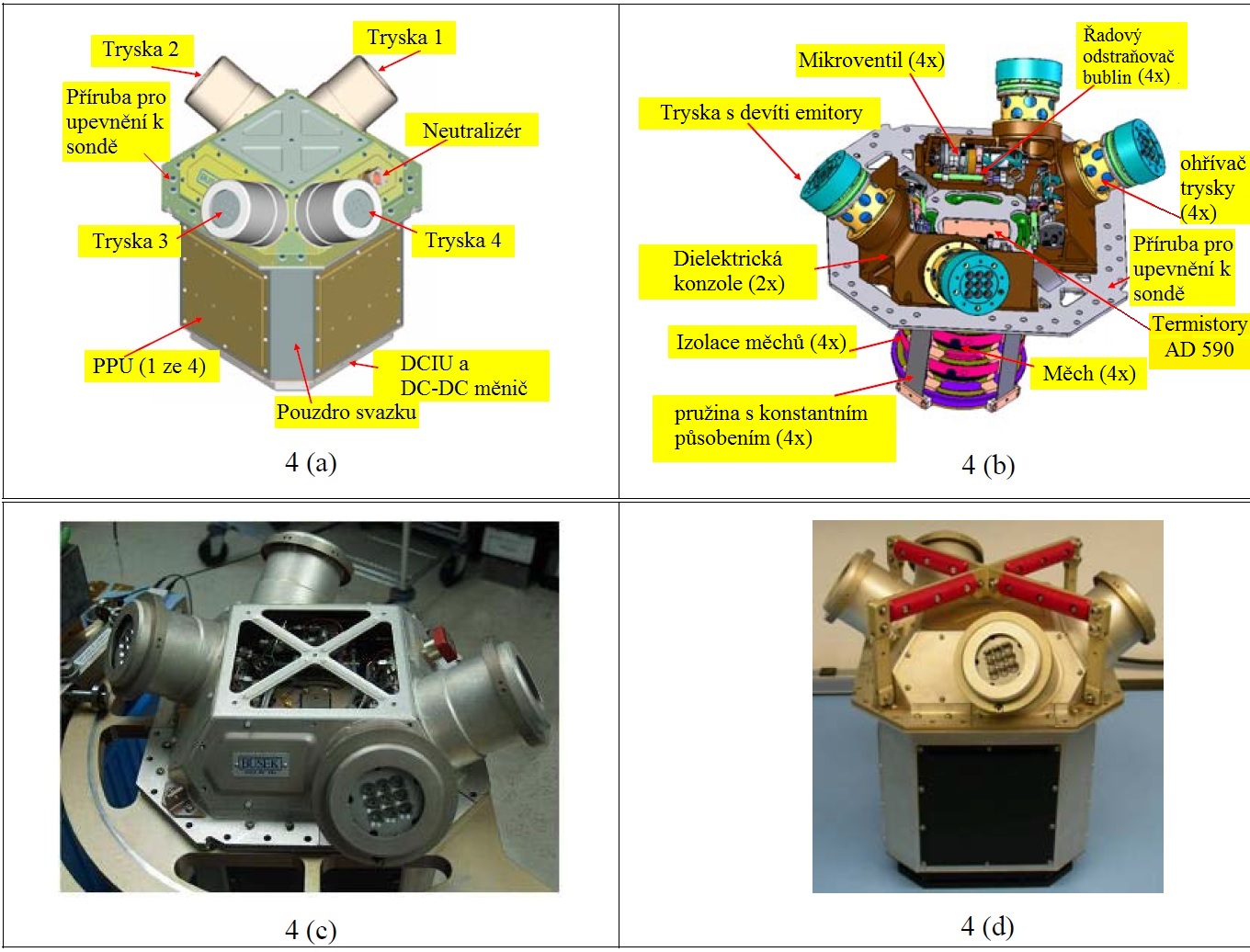
Vnitřní design svazku je ukázán dále na obrázku 4. Spodní část svazku obsahuje čtyři vzájemně elektricky izolované měchy z nerezové oceli stlačené lineárními pružinami, 4 PPU reprezentované čtyřmi obdélníkovými boxy na okraji svazku, a DCIU která je umístěna na dně pouzdra svazku. Jedna DCIU řídí všechny čtyři trysky svazku a dostává povely z počítače DRS. Vrchní část svazku tvaru komolého jehlanu obsahuje 4 mikroventily a poskytuje montáže pro 4 trysky a neutralizéry. Jelikož je sonda na své oběžné dráze v bodě L1 neustále osvícena Sluncem, fotoemise sníží potřebu neutralizérů a proto byl jejich počet ve svazku snížen ze čtyř na jeden.
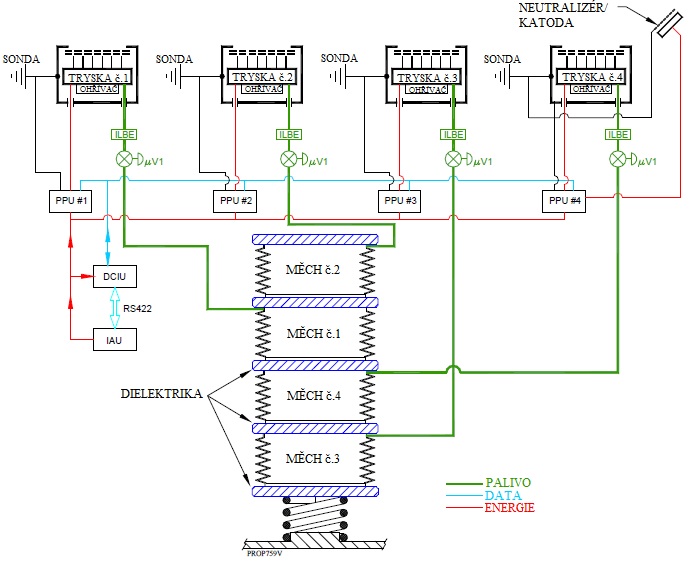
Obrázek 5 ukazuje design nejvyšší úrovně elektromechanického systému svazku, které představuje cesty a propojení palivem, daty a proudem uvnitř svazku. DCIU komunikuje s IAU skrze rozhraní RS 422 a dostává aktualizace příkazů o požadovaném tahu o frekvenci 10 Hz. DCIU vypočítá napětí paprsku a proud paprsku, stanoví hodnoty a odešle je v analogové formě individuálním jednotkám PPU. Díky nezávislému řízení rychlosti průtoku a napětí paprsku každého svazku může být dosaženo požadovaných hodnot rozsahu a šumu tahu uvedených v Tabulce 1. Jednou z velkých výhod koloidních trysek je, že napětí pro zrychlení a rychlost průtoku mohou být ovládány nezávisle na sobě, což vytváří široké rozpětí tahu a specifického impulsu, z nichž každý může být upravován nezávisle.
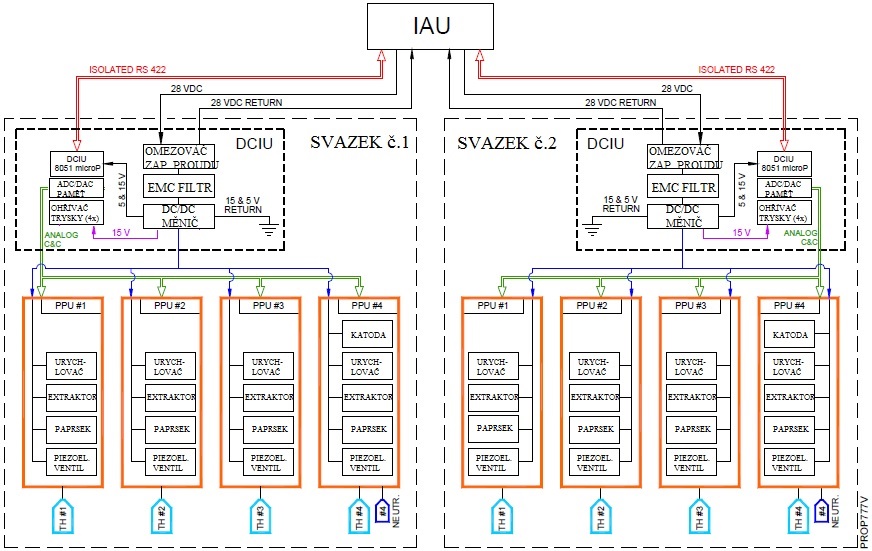
Obrázek 6 popisuje elektrický systém architektury pro každý svazek, zobrazuje datová a elektrická spojení a 6 DC-DC měničů v každé PPU. Tyto měniče zahrnují měnič paprsku, extraktoru, urychlovače, piezoelektrického ventilu, katody a dodávky energie pro ohřívač. Celý systém byl zjednodušen díky redukci neutralizérů ze 4 na 1 kvůli důvodům popsaným výše.
Komponenty koloidních mikrotrysek CMNT

Koloidní tryska DRS je ukázána na Obrázku 7. Skládá se z devítijehličkového emitoru, mřížek extraktoru a urychlovače, a ohřívače řízeného jednotkou DCIU. Emitor se skládá z kapilár s velkým poměrem délky k průměru. Každý emitor je odnímatelný což umožňuje konfiguraci počtu emitorů od jednoho po devět. Hydraulický odpor paralelních emitorů se musí shodovat, aby bylo zajištěno, že všechny emitory mají stejný podíl z celkového proudu paprsku. Emitory a extraktor mohou pracovat až do 10 kV vzhledem k potenciálu povrchu Země. Emitor má potenciál typicky označovaný jako napětí paprsku (Vb). K vytvoření stabilního Taylorova kužele je potřeba, aby byl rozdíl mezi potenciálem paprsku a extraktoru přibližně 1600 voltů. Urychlovač má stálé záporné napětí Va o hodnotě 1000 voltů, které zabraňuje elektronům přijít do kontaktu s mřížkou. Mřížky jsou připevněny k dielektriku (izolátoru), které musí udržovat odpor >10 GΩ. Palivo vstupuje do rozvodů trysky skrze jeden port a poté proudí skrze plynoprostupné trubičky, které usnadňují únik plynů nebo výparů, které se mohou v palivu vytvořit, do vesmírného vakua. Tryska je ohřívána odporovým ohřívačem, který je v tepelném kontaktu s palivovými rozvody trysky, avšak jinak je od trysky izolován a má potenciál povrchu Země. Výkon ohřívače je možné regulovat od téměř 0 po 2,5 W a je řízen jednotkou DCIU díky termistoru uvnitř ohřívače. Očekává se, že tryska bude v průběhu mise soustavně ohřívána a udržována při konstantní teplotě. Očekávaný příkon ohřívače při stabilních provozních podmínkách je několik desítek mW, podobně jako maximální příkon koloidní trysky, který je zhruba 50 mW.

Palivový systém koloidní trysky se skládá ze tří hlavních částí: 1) palivová nádrž na bázi měchů; 2) regulátor toku paliva; a 3) řadový odstraňovač bublin, který usnadňuje jakýmkoliv plynům a výparům z paliva uniknout do vesmírného vakua. Tyto hlavní části si nyní postupně popíšeme.
Palivo je uskladněno v soustavě vzájemně elektricky izolovaných (>10 GΩ) měchů svařených z nerezové oceli, které jsou neustále udržovány stlačené pomocí lineárních pružin poskytujících tlak ≈10-15psig v průběhu celého operačního rozmezí měchů. Každý měch zásobuje palivem jednu trysku s mikroventilem. Celý systém čtyř měchů použitý pro svazek čtyř nezávislých trysek je ukázán na Obrázku 8 a je vidět také na Obrázku 4 výše.

Tok paliva do každé trysky je regulován piezoelektrickým mikroventilem zobrazeným na Obrázku 9. Tělo ventilu je v kontaktu s palivem a má potenciál trysky (<10 kV), zatímco piezoelektrický element je ukostřen k plášti konstrukce. Ventil byl vyvinut firmou Busek za účelem velice přesného a nepřetržitě proměnlivého řízení toku paliva při extrémně nízkých průtocích vyžadovaných koloidními tryskami. Regulace průtoku je zajištěna změnami mezery mezi keramickým vstupním otvorem a těsnícím povrchem. Minimální průtok je ~10-9 l/sec a minimální stupeň regulovatelnosti průtoku je ~10-11 l/sec. Takovéto parametry jsou potřeba, aby byla dosažena citlivost tahu a jeho regulovatelnost maximálně 0.1 μN jak je uvedeno v Tabulce 1. Různé ventily během testů dohromady absolvovaly řádově 15 000 hodin bez jediného selhání. Nejdelší operační čas jednoho ventilu byl přibližně 3 500 hodin bez jediného selhání nebo nuceného ukončení testu. Během celého testování byl piezoelektrický element neustále regulován frekvencí 10 Hz k udržení požadovaného napětí paprsku nebo tahu.

Palivo za mikroventilem proudí skrze řadový odstraňovač bublin (ILBE – In-line Bubble Eliminator) zobrazeným na Obrázku 10. Patentovaný odstraňovač bublin usnadňuje únik plynů a výparů, které mohou být přítomny v palivu, do vesmírného vakua. Plyny nebo nestálé nečistoty v palivu se od něj obvykle oddělují, když je ventil uzavřen, a tlak paliva klesá na pouhých několik milimetrů rtuťového sloupce. Ačkoliv toto zařízení není zcela nezbytné, pomáhá v počátečních fázích pracovního cyklu celého systému.
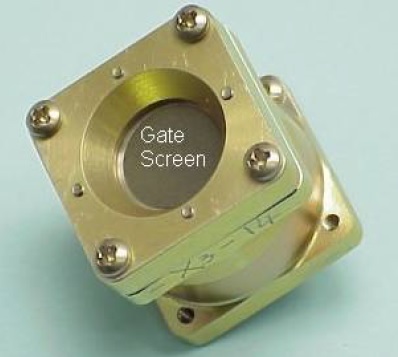
Neutralizér zobrazený na Obrázku 11 využívá mnohostěnné karbonové nanotrubičky (CNT) vyvinuté firmou Busek pro emitaci elektronů. Elektrony neutralizují proud pozitivně nabitých částic (koloidů), které jsou vyzařovány koloidními mikrotryskami, a zajišťují, že sonda nezíská náboj vzhledem k okolnímu plazmatu.
Neutralizér je navržen k vyzařování 1 mA. Pro koloidní mikrotrysky není očekávaný proud pro neutralizaci vyšší než 0,1 mA a to včetně započtených vlivů vesmírného plazmatu. Neutralizér byl testován samostatně bez připojení k trysce při proudu 100 mA po dobu 13 000 hodin. Napětí potřebné k neustálému vyzařování tohoto proudu se monotónně zvyšovalo, avšak nedošlo k žádné poruše. Dále byly testovány efekty kontaminace palivem a slunečním UV zářením na stabilitu záření neutralizéru, ale nebyly zpozorovány žádné významné nebo trvalé následky na výkon katody.
Charakteristickými součástmi neutralizéru jsou polovodičová podložka pro podporu karbonových nanotrubiček, perforovaná brána, která je od nanotrubiček oddělena dielektrikem, a hliníkové tělo celého neutralizéru. Klíčovým parametrem je zlomek otevřené plochy brány, který je přímo úměrný zlomku emitovaných elektronů, které přicházejí s bránou do styku. Současný design má podíl otevřené plochy brány 70 %.
LISA Pathfinder
Technologický demonstrátor LISA Pathfinder odstartoval na svou misi pomocí evropské rakety Vega 3. prosince 2015. Šest týdnů po startu dorazila sonda do své destinace, kde začala testovat technologie pro hledání gravitačních vln. Její oběžná dráha se nachází okolo libračního centra L1 soustavy Země-Slunce. Už během prvního dne mikrotrysky dosáhly plánované přesnosti. V dalších týdnech se tedy přistoupilo k pokusům o zpřesnění výsledků a to se také povedlo, a to hned pětkrát. LISA Pathfinder tak dosáhla úctyhodného rekordu – je 10 000× stabilnější než jakýkoliv jiný přístroj kdy vyslaný do vesmíru.
UPOZORNĚNÍ: Veškeré informace textového i obrazového charakteru v tomto článku jsou vlastnictvím firmy Busek Co. Inc. a jakákoliv jejich publikace, kopírování nebo prodej jsou zakázány. Firma Busek Co. Inc. společně s Americkým institutem pro letectví a kosmonautiku (American Institute of Aeronautics and Astronautics, Inc.) povolila publikaci těchto informací pouze za účelem popularizace na tomto webu.
Na závěr vyjadřujeme velké poděkování panu Vladu Hrubému, PhD, který je prezidentem firmy Busek Co. Inc., za to, že nám poskytl podrobné informace o konstrukci mikrotrysek, které vedly k tvorbě tohoto článku. Přejeme Vám i Vaší firmě mnoho lukrativních zakázek a úspěchů na poli vesmírných technologií.
Zdroj informací:
AIAA paper 2008-4824, presented at the 44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference – ST7-DRS Colloid Thruster System Development and Performance Summary (https://arc.aiaa.org/doi/10.2514/6.2008-4824)
Zdroje obrázků:
http://sci.esa.int/
Dr. Folkner, JPL; AIAA – ST7-DRS Colloid Thruster System Development and Performance Summary
AIAA – ST7-DRS Colloid Thruster System Development and Performance Summary




Parádní článek, děkujeme 🙂 Tak mě napadlo, jen tak pro srovnání, jaký tah má inkoustová tiskárna na jeden pit a nebo na plný set?
Já děkuji za pochvalu.
Uzasny clanek. Celkove serije „Pohled pod kuzi“ je uzasna. Klobouk dolu za zpracovani takovychto technickych detailu do takoveto podoby. A samozrejme obrovsky obdiv pro techniky a inzenyry kteri tyto systemy vyvijeji a montuji. Moc dekuji za skvely clanek a zajimave informace.
Děkujeme. Jsme rádi, že se Vám článek i celý seriál Pohled pod kůži líbí.
Je to úžasné zariadenie, technológia na úrovni LIGO, veď nakoniec má robiť to isté, lenže vo vesmírno prostredí.
Aj článok je úžasný, hodný samotného zariadenia. Zdá sa že ho budem dlho študovať.
pb 🙂
Těší nás, že se Vám článek až tak líbí.
Mňa práve takéto články priťahujú. A ešte viac ma priťahujú články o vedeckých výsledkoch. Veď práve tie dávajú plný zmysel kozmonautike.
pb 🙂
Uf, to je technologie. Skoro bych se na to bál křivě podívat a pak si uvědomím, že to musí odolat tahu při startu rakety. Opravdu mě zaujalo, jak se tam nepracuje jen se samotnými tryskami, ale i s kontrolou náboje na všem možném.
Pro mne až moc sofistikované, ale chápu, sem to patří. Doufám, že Falcon dnes již bez odkladu.
Je samozřejmé, že tento typ článku není pro každého. Stejně jako ostatní díly seriálu Pohled pod kůži cílí na čtenáře, kteří hledají technické podrobnosti. Snažíme se vyhovět co nejširšímu spektru fanoušků kosmonautiky a přinášet informace pro začátečníky i pokročilé.
Super článok a parádna práca prekladateľa (a samozrejme aj tých ktorí tieto zariadenia vyvinuli). A som naozaj rád že na tomto webe vychádza takýto typ článkov.
K tomuto článku sa ešte určite vrátim (ako v podstate ku každému článku zo série „Pod kuži“).
Díky moc 😉
Michaeli, je to paráda!
Nepotka jste nekde informaci, jak je referencni teleso zajisteno pri startu a jak se potom dostane do pozadovaneho mista vuci obslu komory, senzoru atp.?
Dekuji!
Mnohokrát Vám děkuji. Informace o zajištění referenčního tělesa ve zdrojovém dokumentu bohužel není, jelikož ten se stejně jako článek týká pouze mikrotrysek.
Objekty byly na místě drženy pomocí osmi jemných ručiček/pístů. Ty se po dosažení libračního centra stáhly a kostky přestaly být ve fyzickém kontaktu s tělem sondy. Stále je ale na místě držela neviditelná síla – elektronický mechanismus GPRM (Grabbing, Positioning and Release Mechanism), který byl umístěný na dvou protilehlých stranách testovacích komor. K jeho vypnutí došlo až po cca. 14 dnech, kdy se ustálily pohyby.
To „Upozorňujeme“ je super, když uvážíme praktiky zdejšího webu 🙂
Praktiky?
Uff tak to bylo opravdu hutné 🙂 Pár poznámek: CNT = uhlíkové nanotrubičky (x karbonové), microcontroller = mikrokontrolér/jednočip (x mikroovladač), noise = šum (x hluk).
Děkuji za Vaše připomínky k textu. Sám jsem nevěřil, že by tam některý z našich pozorných čtenářů něco nenašel 🙂 Nanotrubičky a mikrokontrolér opravím. Za šumem si stojím.
Informace mne naplňují hrdostí na českou firmu. Ale moc jsem se do toho neponořil, nechci už se stát konstruktérem kosmické techniky. Každopádně díky za nahlédnutí do světa pidipohonů.
Zajímalo by mě-sondy (eLISA) by měly být na velkou vzdálenost propojeny lasery, a ty pak budou měřit odchylky a hledat tak gravitační vlny. A v Česku máme lasery na špičkové úrovni, máme ty jedny z nejlepších… Není možnost, že by pro eLISU se lasery vyráběly v ČR, když jsme v té ESA?
Těžko říct, na tohle by možná znal odpověď Michal Václavík, ale osobně se domnívám že o takto význačnou misi, zvlášť o její klíčový díl, se porvou ti největší hráči v čele v Německem a Francií. Ale je to jen můj odhad, navíc pokud se nepletu, tak výběr firem začne až za pár let.
Úžasné, zpracování, obsah detaily…překlady…neskutečné…
Tuto technologicko informační onaninii nelze jinak než zhltnout naráz…
Perfektní..všem kdo mají zásluhy velký dík 🙂