 6. dubna 2017
6. dubna 2017


Mezinárodní vesmírná stanice neslouží jen k výzkumu nejrůznějších oborů, byť je to mediálně vděčné téma. Zapomínat nesmíme ani na to, že se unikátní prostředí obydlené stanice využívá i ke zkouškám nových technologií, které jednou mohou hrát v kosmonautice velkou roli, ale zatím s nimi nemáme potřebné zkušenosti. Ať už jde o vědecké experimenty, nebo o technologické demonstrátory, většinou platí, že na stanici vydrží zhruba pět let. To je doba, během které mají pozemní týmy dostatek času na nejrůznější testy a pak už je čas uvolnit místo novým experimentům. ISS se tak rozloučila s demonstrátorem RRM, na kterém se testovalo robotické doplňování paliva.
19. února se do vesmíru vydala desátá zásobovací loď Dragon, která kromě jiného vezla i vědecký přístroj Raven (především k monitorování přilétajících lodí pro budoucí automatické dokování). Přístroj byl vyjmutý z nehermetizovaného nákladového prostoru a umístěn na vnější část stanice. Raven se usadil na místě, které předtím okupoval právě RRM (Robotic Refueling Mission). Pro tento přístroj to znamenalo jediné – je na čase opustit ISS. RRM tak byl uložen do trunku Dragonu, ve kterém byl předtím umístěný Raven.
19. března se Dragon oddělil od ISS a před vstupem do atmosféry se rozdělil podle plánu na dvě části – zatímco návratová kabina byla chráněná tepelným štítem, aby mohla měkce přistát na padácích, trunk nic takového nemá a shořel tak v atmosféře. Možná si říkáte, že pro budoucí autonomní lodě jsou potřeba oba přístroje – jak RRM, tak Raven. Pro odsun RRM ale hovořilo to, že už splnil svůj úkol a může tak uvolnit místo novým experimentům.
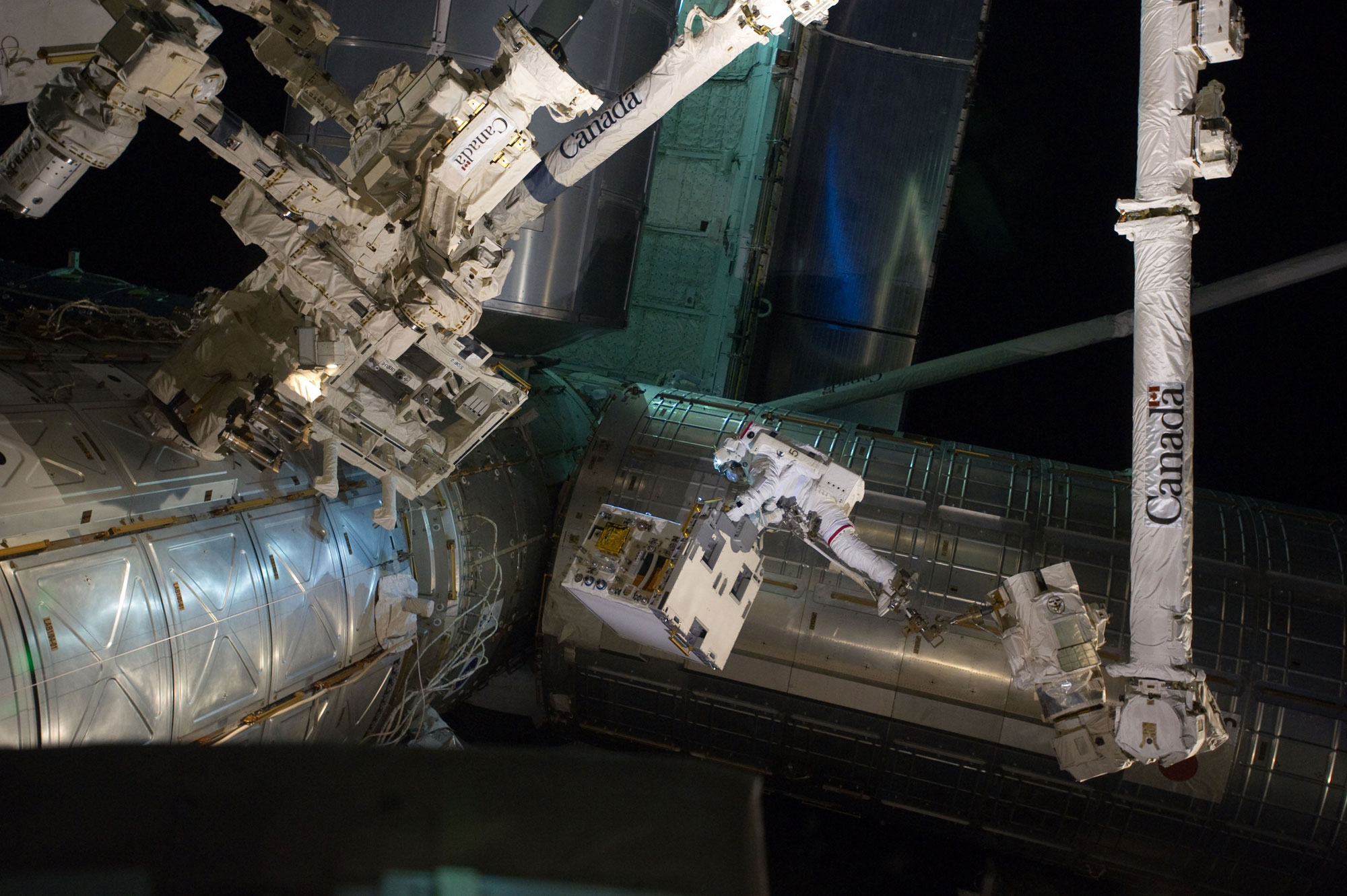
Astronaut Mike Fossum při výstupu přenáší experiment RRM.
Zdroj: https://www.nasa.gov
Tým zajišťující chod RRM se rozhodně nemá za co stydět. V posledních letech totiž položil pevné základy budoucích možností servisování na oběžné dráze. Ukázalo se, že z technologického hlediska bychom měli být na doplňování paliva připraveni a můžeme tak začít uvažovat o jejím používání. Přístroj RRM letěl do vesmíru v červenci roku 2011 na závěrečné raketoplánové misi STS-135. Šlo o historicky poslední náklad, který byl z nákladového prostoru raketoplánu vyjmutý astronauty.
Následně byl umístěný na plošinu Express Logistics Carrier. V dalších měsících probíhaly zevrubné zkoušky, které ověřovaly jednotlivé nástroje, ale i odlišné techniky a technologie nutné k robotickému doplňování paliva a opravování družic. Důležité je, že inženýři si od začátku nedávali malé cíle a rovnou začali cílit na reálný problém – jak dotankovat družici, které dochází palivo, ale přitom se u ní při výrobě s žádným doplňováním paliva nepočítalo. Zjednodušeně řečeno – neexistuje žádné víčko od nádrže, které se odmontuje, aby se mohlo natankovat. Robot si tak musel cestu do nádrže sám udělat.
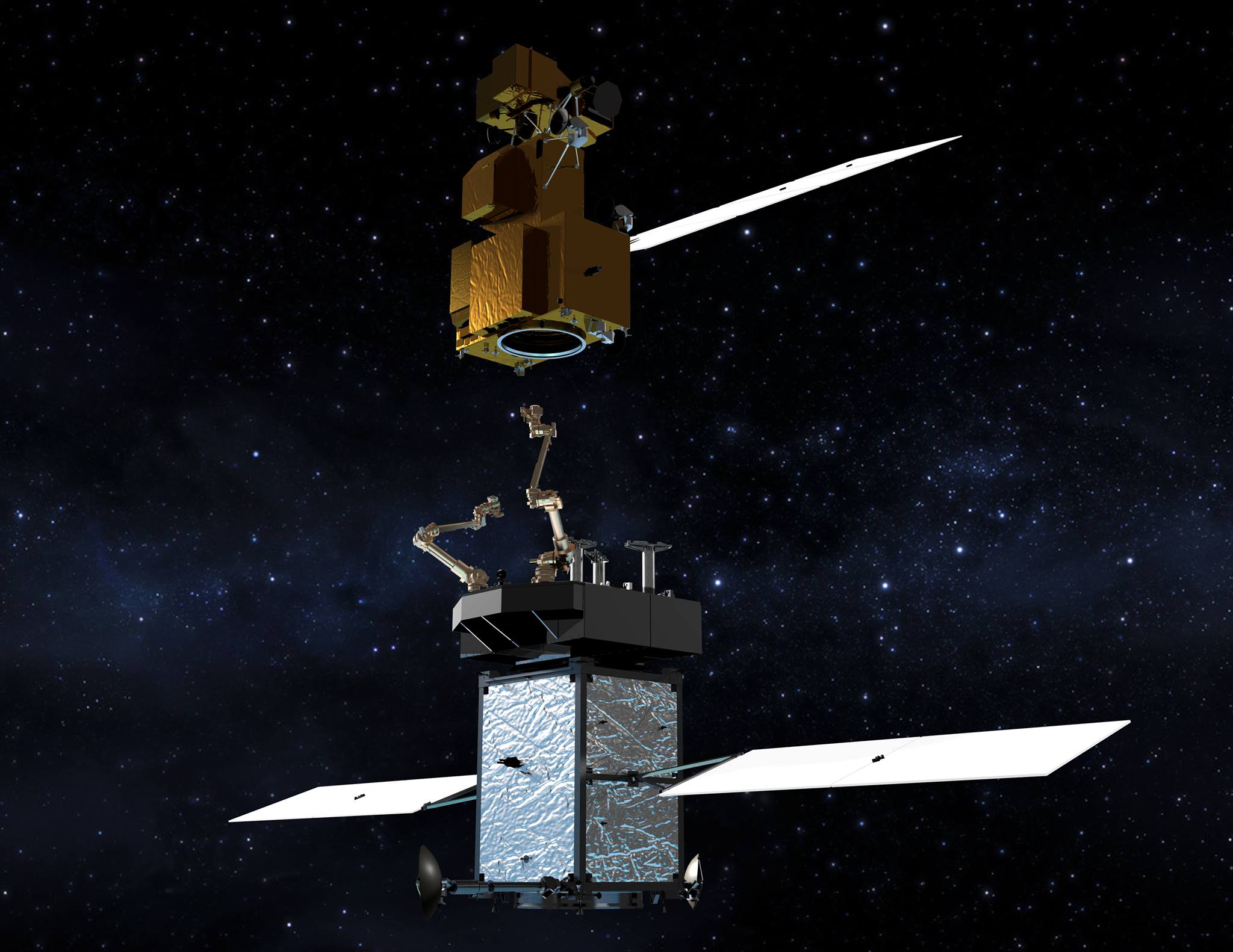
Satelit Restore-L má otestovat technologie doplňování paliva jiným strojům. Ke startu by mohlo dojít v roce 2020 a jako cíl by mohl být vybrán satelit Landsat 7.
Zdroj: https://scontent-fra3-1.xx.fbcdn.net
Experiment RRM byl nezbytným krokem mezi pilotovanými servisními misemi, mezi kterými hrají prim lety k Hubbleovu teleskopu a mezi robotickými servisními projekty, které vyzkouší připravovaná mise Restore-L. Specialisté se podle svých slov už nemohou dočkat, až budou moci aplikovat poznatky z RRM na budoucích servisních misích.
Plánování Robotic Refueling Mission začalo už v roce 2010, kdy skončila poslední servisní mise k Hubbleovu teleskopu. Bylo jasné, že raketoplány brzy odejdou do penze a stovky inženýrů z Goddardova střediska, kteří se věnovali servisním misím k HST, věděli, že budoucnost bez raketoplánů bude obtížná. Tým pod vedením Franka Cepolliny začal „brainstormovat“, jak by bylo možné pokračovat v servisních pracích bez účasti raketoplánů. Času nebylo nazbyt a proto padlo jednoznačné rozhodnutí – budoucí servisní úkony budou plnit roboti. Odtud už byl jen krůček k využití kanadského ramene Canadarm2 na ISS, které se k tomuto účelu ideálně hodilo.
O pouhých 18 měsíců později – což je vzhledem ke komplexnosti celého projektu jen stěží uvěřitelné číslo – už byl RRM v nákladovém prostoru raketoplánu. Stihlo se to na poslední chvíli – po Atlantisu už žádný další raketoplán neletěl. Můžeme v tom najít i jakousi skrytou symboliku. Raketoplán, symbolizující jednu éru servisních misí pomohl dostat do vesmíru svého nástupce.
Samotný přístroj RRM byl svou velikostí srovnatelný s průměrnou pračkou a na palubě nesl čtyři specifické nástroje, kterých se ujal menší nástavec robotické ruky – malý robot Dextre. Díky jeho preciznímu ovládání bylo možné projít všemi komplexními úkoly, které dotankování družice obnáší. Šlo především o prořezávání skrz izolační vrstvy a jejich následné odklápění. Kromě toho se musely odšroubovat různé zátky, získat přístup k ventilům a vše zakončit přesunem látky, která symbolizovala raketové palivo.
Už v březnu 2013 přišla velmi dobrá zpráva – tým kolem RRM potvrdil, že jejich robot dokáže doplnit palivo přes trojitě izolovaný palivový ventil, což bylo potvrzeno natankováním 1,7 litru etanolu. V letech 2013 a 2014 se k ISS vydal nový doplňkový hardware, který obsahoval nové panely s úkoly, ale i nové nástroje. Díky lodi HTV-4, která dovezla nový hardware mohl experiment vstoupit do etapy označované RRM Phase 2.

VIPIR (Visual Inspection Poseable Invertebrate Robot)
Zdroj: https://sspd.gsfc.nasa.gov
Tady se testovaly činnosti nutné k servisování volně letících družic. Novou „hračkou“ dovezenou lodí ATV-5 byl nástroj VIPIR (Visual Inspection Poseable Invertebrate Robot), což je pohyblivé boroskopické zařízení využívající pokročilé technologie pro důkladnou inspekci prováděných úkonů.
V únoru 2014 zároveň došlo k experimentu, který se sice neodehrál ve vesmíru, ale přesto do tohoto tématu patří. Robotické zařízení RROxiTT (Remote Robotic Oxidizer Transfer Test) umístěné na Kennedyho středisku na Floridě dokázalo přes standardní palivový ventil používaný na satelitech převést oxid dusičitý. Robot byl přitom řízen z 800 kilometrů vzdáleného Goddardova střediska.
Obě fáze dopadly úspěšně a pozemní týmy mohly slavit úspěch. Není tajemstvím, že už pracují na třetí fázi RRM, která má pokračovat v nastaveném trendu zvyšování pomyslné laťky technologické náročnosti. Konkrétně by se třetí fáze měla zaměřit hlavně na manipulaci s kryogenními palivy, ale také na interakci s xenonovým vybavením. Tento plyn používají iontové motory a s jejich nasazením se ostatně počítá nejen při budoucích vědeckých misích, ale měly by najít uplatnění při cestách pilotovaných posádek mimo zemské gravitační pole.
Třetí fáze ale už bude potřebovat pokročilejší vybavení a přístroj RRM již nevyhovuje. Odešel tedy do pomyslného důchodu, ale zanechal za sebou výraznou stopu, která může pomoci realizovat mise, které se ještě před pár desítkami let zdály nereálné, ale nyní nás od nich dělí jen pár let. Vždyť projekt Restore-L má startovat už v roce 2020 a jako cíl by mohl být vybrán satelit Landsat 7.
Zdroje informací:
https://www.nasa.gov/
https://sspd.gsfc.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/mission_pages/station/research/experiments/RRM3.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/10_rrm_sts-135_spacewalk.jpg
https://scontent-fra3-1.xx.fbcdn.net/…6792349020630502678_o.jpg
https://sspd.gsfc.nasa.gov/images/5_RRM%20VIPIR%20Tool%20full%20view.jpg





 Rubrika
Rubrika  Štítky:
Štítky: 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
Je to OT ale to slovo štandardizácia ma navádza k otázke, prečo dokovacie porty niesú štandardizované.
Pro „velké“ dokovací uzly je standard definován (IDSS). Ale co se satelitů týká, také by mě zajímalo, jestli alespoň jednotliví výrobci družic používají svá proprietální řešení. Ona je tedy i otázka, jestli v minulosti měli výrobci/provozovatelé vůbec zájem navyšovat hmotnost družic kvůli případné možnosti doplňování provozních náplní na orbitě.
Zdravim,
mel bych dve otazky.
1. Jsou uz nektere druzice aktualne ve vesmiru na toto pripraveny a ceka se jen na „tanker“? Jesli ano, znamena to, ze uz nejakou dobu existuje nejaka specifikace, nebo dokonce standard? Prece jenom bych cekal, ze pokud sonda s tim dopredu nepocita tak po natankovani treba nenavratne zapeceti tankovaci ventili aby jejich mechanismus uz nemohl selhat.
2. Uz mi zde bylo zodpovezeno ze nadrze druzic/sond jsou dvouplastove (pevna nadrz + vak) a mezi plaste se vhani tlakovaci plyn. Jak ale druzice ziskava informace o objemu paliva v nadrzich? Spoleha se jen na odcitani od zakladniho objemu na zaklade prutoku z ni, nebo existuje nejaky system jak merit primo objem?
Dekuji
Na oběžné dráze jsou družice, které na to nejsou připravené, ale právě o to se tenhle experiment snažil – doplnit palivo družicím, u kterých se s tím předtím nepočítalo. V tom je celý experiment přelomový. Bude jedno, zda na to byla družice připravena, nebo ne.
Palivo se určuje jednak průtok, ale také výpočtem změny rychlosti – jak ubývá hmotnost, mění se i zrychlení sondy při zážehu. I z toho se dá dopočítat úbytek paliva.
Male OT: doplnovali Hubbleovi pri servisnych misiach aj palivo? Predpokladam, ze ano. Zaujimavejsie skor je, ci bol Hubble sam na to designovany, alebo ho upravili pri niektorej z pociatocnych misii.
Hubble ke stabilizaci a orientaci nepoužívá motory, ale gyroskopy. Tím pádem nebylo nutné doplňovat palivo. O dopravu na určený orbit se postaraly raketoplány.
Při poslední servisní misi STS-125 se zvažovalo připojit k Hubbleovi raketový motor, který by se na konci postaral o deorbit teleskopu. Nakonec to ale padlo a astronauti instalovali jen nějakou platformu pro připojení dalšího plavidla, které teleskop navede do atmosféry svými motory. Jeden čas se dokonce pro tento úkol počítalo s lodí Orion ale to už asi není aktuální. Teleskop stále funguje a dej mu pámbu dlouhá léta.