„Je víkend! Když se tak dívám na to, co mě čeká v příštím týdnu, jednou z největších událostí bude výuka sledování a zachycení s Butchem (mým kolegou Barrym Wilmorem). Výcvik ve sledování a zachycení připravuje členy posádky Mezinárodní vesmírné stanice na připojení lodí, které je na stanici navštíví, zejména tedy ty, kterým říkáme Free Flyers – to proto, že se k ISS nedokážou připojit autonomně. Nákladní lodě jako jsou HTV, Dragon a Cygnus na sobě mají kotvící trn, který je možné zachytit efektorem, který se nachází na konci robotické paže. Hned vedle tohoto trnu je terčík, díky kterému astronaut může všechno patřičně srovnat do roviny.
Sobota 10. srpna 2013
Část „sledování“ představuje srovnání případného rozdílu rychlosti a rotace mezi zásobovací lodí a stanicí v okamžiku, kdy je loď ve vyčkávací pozici. Doposud byly všechny opravdové lodě docela stabilní, avšak při tréninku zakoušíme poměrně výrazné rozdíly rychlostí!
Už jsem absolvovala mnoho samostatných hodin sledování a zachycení. Samostatných tedy znamená já a instruktor. Výcvik v příštím týdnu bude prvním, kdy s Butchem, který se mnou bude v posádce ISS, budeme procvičovat vzájemnou koordinaci a spolupráci. Zatímco je jeden ze členů posádky za řídicím pultem, soustředí se na cíl a provádí jeho zachycení, jeho kolega má všeobecný přehled a prohlíží kontrolní seznamy pro případ, že by nastala nějaká nestandardní situace.
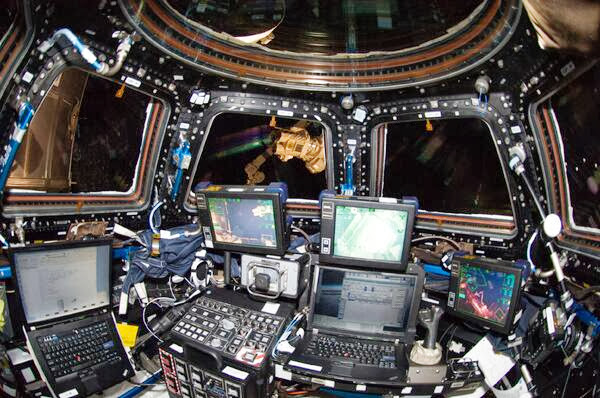
Mimochodem, na oběžné dráze včera Karen Nyberg za asistence Chrise Cassidyho zachytila HTV-4. Na fotografii je můžete vidět v Cupole za ovládacím pultem staničního ramene. Fotografii pořídil můj kolega Luca Parmitano.

Zdroj: https://plus.google.com/
Čtvrtek 15. srpna 2013
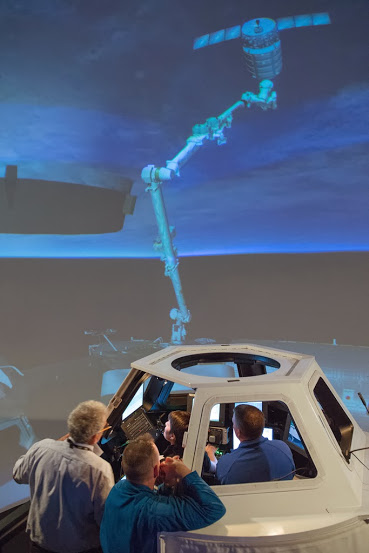
Dnes mám na programu výcvik ve sledování a zachycení, o kterém jsem vám psala v minulém zápisu. Setkání na oběžné dráze s nákladní lodí a následné zachycení vyžaduje mnoho přípravných prací. Vše provádí dvoučlenný tým, který si mění své vedoucí role, když se z fáze přibližování přechází do fáze robotických operací (tedy zachycení). VV1 (Visiting Vehicle Officer 1), který má hlavní zodpovědnost během fáze setkání na oběžné dráze a přiblížení, se během přechodu k robotickým operacím stává podpůrným členem. Na druhou stranu VV2 se v tento okamžik stává tím hlavním, ujímá se ovládání robotické paže a provádí sledování a zachycení. Této roli říkáme M1.
Jak můžete vidět na fotografii níže, v den zachycení je v Cupole přichystána poměrně komplexní soustava monitorů a ovládacích prvků. Je zde především ovládací panel robotické paže Canadarm2 včetně ručního ovládání. Máme tady ale také ovládací panel přilétávající nákladní lodi, pomocí kterého ji těsně před zachycením přepneme do takzvaného volného letu. Jakmile ji totiž zachytíme, stane se loď součástí pevně připojenou ke stanici a my nechceme, aby se její korekční trysky zažehly. A právě proto musíme deaktivovat její řídicí systém a necháme ji, aby byla v prostoru nekontrolovatelně unášena po dobu několika sekund. Na řídicím panelu máme dále tlačítka s příkazy, kterými můžeme nákladní loď poslat pryč v případě nějaké nestandardní situace. A samozřejmě zde také máme, jak můžete vidět, množství monitorů s výstupy z externích kamer.
Zdroj: https://plus.google.com/
Sobota 17. srpna 2013
Naposledy jsem vám psala o tréninku sledování a zachycení s Butchem, který probíhal minulý týden. Následující týden mě čeká ještě další výcvik v této oblasti, při kterém budu mít možnost procvičovat koordinaci a komunikaci s jiným mým kolegou – s Terrym.
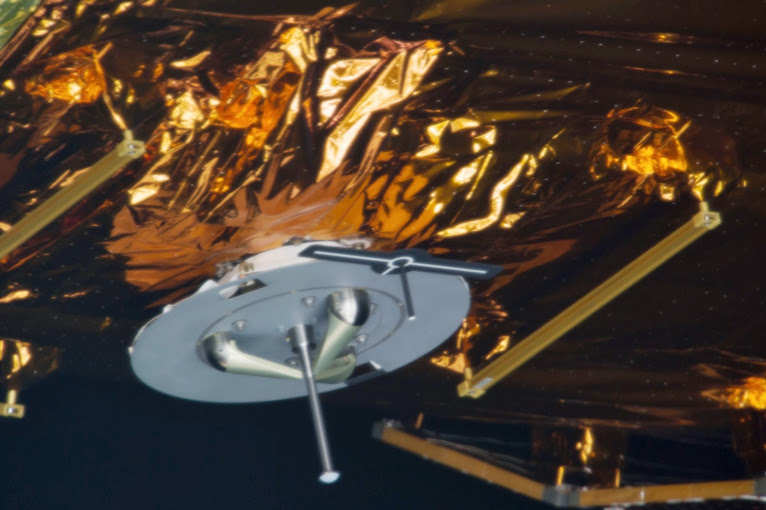
Při všem tom výcviku na simulátorech jsem byla zvědavá, jak vypadá opravdový hardware, takže jsem si prohlížela fotky ze zachycení HTV-4 v minulém týdnu, kdy loď zachytili Karen Nyberg a Chris Cassidy. Hodně se mi líbí tyto dva detailní snímky pořízené před a po zachycení.
Zdroj: https://plus.google.com/
Na fotografii „před“ vidíte dlouhý trn trčící do prostoru z kotvícího bodu. Smyčky efektoru na konci robotické paže se okolo něj uzavřou v okamžiku, kdy stiskneme spoušť. Samozřejmě za předpokladu, že jsme ve správné pozici. Bílá čára s kroužkem uprostřed s kratším trnem je terč, který vidíme díky kameře na efektoru. Můžete si všimnout, že ten malý trn má na své špičce bílý bod. Pokud na obrazovce vidíme bílý bod uvnitř bílého kroužku, víme, že máme dostatečně dobré vyrovnání ve dvou osách (bočení a klopení).

Zdroj: https://plus.google.com/
Na fotografii „po“ budete pravděpodobně schopni rozeznat koncovou kameru efektoru, která míří přímo dolů na terčový trn.
Čtvrtek 14. listopadu 2013
Dnes vám povím, jak probíhá samotné zachycení nákladní lodě robotickou paží. Celá procedura bývá prováděna dvěma členy posádky, jmenovitě primárním VV1 (Visiting Vehicle Officer) za podpory sekundárního VV2. Ve vzdálenosti 10 metrů od stanice, kde nákladní loď zaparkuje, se tyto role prohodí. VV2 se stává M1 a je hlavním člověkem zodpovědným za zachycení, což v praxi znamená, že ovládá robotickou paži. Z VV1 se stává M2 a jeho role je během zachycení podpůrná: zatímco se M1 soustředí na svůj cíl a manévruje k němu robotickou paží do pozice pro zachycení, M2 se stará o kamery, komunikaci s pozemním střediskem a hlásí vzdálenost ke kotevnímu bodu. Pokud je na palubě třetí člen posádky vycvičený pro tyto operace, můžeme si dopřát luxusu a mít k dispozici VV3 – třetí pár očí sledujících celou situaci. Zároveň mu může být svěřen některý z úkolů, jako je například starost a dohled nad kartičkami s předepsanými postupy v případě nenadálých událostí.
Když monitorujeme přiblížení nákladní lodi jako je Dragon, Cygnus nebo HTV, nejčastěji máme v Cupole nastavený obrazový výstup ze tří kamer. Protože používáme Cupolu jako hlavní stanoviště pro ovládání robotické paže (záložní je v modulu Destiny), možná si lámete hlavu nad tím, proč vůbec potřebujeme záběry z kamer, když máme přímý výhled na celou akci z našich oken. Důvodem jsou doplňková data, která jsou generována softwarem a jsou zobrazována přímo na displej s obrazem z kamery. Jedním velkým elementem je například koridor, ve kterém musí nákladní loď zůstat během přibližování. Dále zde máme oblast, ve které musí zůstat kotvící bod během zachycení a mnoho telemetrických dat. Data na displeji nám také umožní porozumět tomu, jaké posuvné a rotační pohyby musíme udělat, abychom srovnali efektor robotické paže do jedné roviny s kotvícím trnem. V neposlední řadě nám také grafika zobrazuje, kdy jsme v té správné vzdálenosti pro stisknutí spouště a uzavření smyček, tedy zachycení.
Pokud byste chtěli vidět více fotografií z tohoto výcviku, navštivte můj profil na flickru.“
Zdroj: https://plus.google.com/

Zdroj: https://plus.google.com/
Zdroj informací:
https://plus.google.com/
Zdroj obrázků:
https://plus.google.com/